| Информационная система | |
ГОСУДАРСТВЕННЫЙ КОМИТЕТ СССР ПО СТАНДАРТАМ
НАУЧНО-ПРОИЗВОДСТВЕННОЕ ОБЪЕДИНЕНИЕ
«ДАЛЬСТАНДАРТ»
МЕТОДИКА ОПРЕДЕЛЕНИЯ
МЕСТОПОЛОЖЕНИЯ РАЗВИВАЮЩИХСЯ
ДЕФЕКТОВ АКУСТИКО-ЭМИССИОННЫМ МЕТОДОМ
МИ 207-80
Москва
ИЗДАТЕЛЬСТВО СТАНДАРТОВ
1980
Разработана научно-производственным объединением «ДАЛЬСТАНДАРТ» (НПО «ДАЛЬСТАНДАРТ»)
Генеральный директор А.А. Гусаков
Исполнители Б.Я. Маслов, Л.А. Саитова
Внесена отделом неразрушающих испытаний НПО «ДАЛЬСТАНДАРТ»
Зав. отделом В.А. Константинов
Утверждена Научно-техническим советом НПО «ДАЛЬСТАНДАРТ»
СОДЕРЖАНИЕ
МЕТОДИКА
ОПРЕДЕЛЕНИЯ
МЕСТОПОЛОЖЕНИЯ РАЗВИВАЮЩИХСЯ ДЕФЕКТОВ
АКУСТИКО-ЭМИССИОННЫМ МЕТОДОМ
МИ 207-80
Настоящая методика устанавливает акустико-эмиссионный метод контроля любых геометрических форм нагружаемых конструкций и любых сварных швов, выполненных дуговой, электрошлаковой, газовой и электронно-лучевой сваркой, для выявления развивающихся дефектов (РД).
При контроле объектов простой геометрической формы обеспечивается наименьшая погрешность определения местоположения РД.
Крупногабаритные конструкции контролируют с помощью системы приемных преобразователей, сетью охватывающих поверхность конструкции.
Минимальные размеры объектов контроля составляют не менее 0,1 м в одном из измерении.
Методика носит рекомендательный характер и действует в пределах предприятий, располагающих оборудованием и приборами, указанными в разд. 1.
1. СРЕДСТВА КОНТРОЛЯ
1.1. При контроле должны быть использованы:
акустический местоуказатель разрушений (АМУР-Д, АМУР-Д4, АИ/ИК-250, АМУР-4М, АМУР-5, АМУР-6);
генератор импульсов типа Г5-54 (Г5-15);
излучающий пьезопреобразователь с круговой диаграммой направленности;
контролируемые объекты.
1.2. Для акустического местоуказателя разрушений должны быть указаны: номинальное значение рабочей частоты; чувствительность пьезопреобразователей к продольным волнам в рабочем диапазоне частот; формы и размеры пьезопреобразователей; уровень собственных шумов, приведенных ко входу; быстродействие.
Примечание. Чувствительность пьезопреобразователей определяется по методике аттестации измерительных приемных электроакустических пьезопреобразователей акустической эмиссии (АЭ) - МИ 154-78.
1.3. Для генератора импульсов должны быть указаны: частота повторения импульсов; длительность импульсов; амплитуда импульсов.
1.4. Для контролируемого объекта должны быть указаны форма и размеры.
2. ПОДГОТОВКА К КОНТРОЛЮ
2.1. С целью установления отсутствия механических повреждении проводят внешний осмотр акустического местоуказателя разрушений. Проверяют также его работоспособность по инструкции по эксплуатации.
2.2. Проводят внешний осмотр генератора импульсов и излучающего пьезопреобразователя, проверяют их работоспособность по инструкциям по эксплуатации.
2.3. Освобождают поверхность объекта контроля в местах установки преобразователей от лакокрасящих покрытий, опалины или ржавчины. При необходимости поверхность зачищают.
Примечание. Сварные швы перед контролем очищают от шлаковой корки.
2.4. Устанавливают приемные преобразователи па поверхности объекта так, чтобы ими, по возможности, охватывалась вся контролируемая область.
Примечания:
1. Примеры размещения приемных преобразователей на объектах контроля некоторых типов приведены в приложении 1.
2. Не допускается устанавливать пьезопреобразователи в местах объекта, температура которых во время контроля может превысить предельную рабочую температуру преобразователя.
3. Не допускается воздействие на преобразователи ударных нагрузок при их установке на поверхность объекта.
2.5. Обеспечивают надежный акустический контакт, например, через слой масла, между поверхностью объекта контроля и преобразователями.
Примечание. В помещении, где проводят контроль объекта, должны быть, по возможности, исключены посторонние акустические и электромагнитные помехи.
2.6. При определении местоположения развивающихся дефектов акустико-эмиссионным методом оператор должен руководствоваться действующими «Правилами технической эксплуатации электроустановок потребителей и правилами техники безопасности при эксплуатации электроустановок потребителей», утвержденными Госэнергонадзором 12 апреля 1969 г. (изд. 3-е, М., «Энергия», 1970), а также требованиями по технике безопасности и противопожарной технике, установленными в нормативно-технической документации на объект контроля.
3. ПРОВЕДЕНИЕ КОНТРОЛЯ
3.1. Имитируют сигналы АЭ в одной точке объекта контроля с помощью генератора импульсов типа Г5-54 (Г5-15), к выходу которого подключают излучающий пьезопреобразователь с круговой диаграммой направленности.
Примечание. Параметры выходных импульсов устанавливают органами управления генератора в следующих пределах: частота повторения не более 100 Гц, длительность 0,1 - 10 мкс, амплитуда 0,1 - 40 В.
3.2. Проверяют идентичность приемно-усилительных трактов по чувствительности. При этом следует следить, чтобы все приемные преобразователи находились в одинаковых условиях (на одинаковом расстоянии от точки имитации сигналов АЭ) относительно источника излучения.
Примечание. Если в результате проверки обнаружится значительный разброс чувствительности каналов (более 20 - 30 % от средней величины), то с помощью регулировочных органов управления следует выровнять чувствительность.
3.3. Выставляют оптимальную величину периода ΔТопт генератора схемы измерения задержек моментов поступления сигналов АЭ в различные каналы приема акустического местоуказателя разрушений в следующем порядке.
3.3.1. Устанавливают излучающий преобразователь имитатора Г5-54 на границе контролируемой области таким образом, чтобы обеспечивалась максимальная задержка между моментами прихода сигнала АЭ в точки приема при контроле.
3.3.2. Подают последовательность имитированных сигналов АЭ (импульсов от генератора Г5-54) и путем изменения величины ΔТ с помощью органов управления акустического местоуказателя разрушений устанавливают такое положение органов управления, при котором начинает переполняться хотя бы одни из счетчиков измерения задержек. Переполнение обнаруживают по прекращению отсчетов при включенной схеме временной селекции сигналов акустического местоуказателя разрушений,
Примечание. Величину ΔТ выбирают, исходя из следующего: при записи отсчетов из рабочей области объекта необходимо максимально использовать емкость измерения задержек, объем памяти запоминающего устройства к площадь экрана видеоконтрольного устройства, так как при этом улучшается разрешающая способность к уменьшается аппаратурная погрешность системы локации РД; достоверные отсчеты из рабочей области не должны отбрасываться схемой временной селекции сигналов, т.е. при максимально возможных задержках счетчики не должны переполняться.
3.4. Скорость v распространения сигналов АЭ в материале объекта контроля вычисляют по формуле
|
|
где l - разность расстояний между излучателем и точками установки приемных преобразователей, используемых для измерения задержки τ = nΔT; n - показания счетчика измерения задержки акустического местоуказателя разрушений.
3.5. Предварительно калибруют поверхность объекта контроля, если материал контролируемого объекта обладает анизотропными свойствами или его поверхность имеет неоднородности и отклонения от правильной формы, возникающие из-за наличия сварных швов, вварышей, углублений, отверстий, резьбовых соединений и т.п. в следующем порядке.
3.5.1. Составляют перечень калибровочных точек поверхности, к которым следует отнести граничные и центральные точки имеющихся неоднородностей, точки установки приемных преобразователей (если они находятся в пределах рабочей зоны), а также другие особые точки.
3.5.2. Наносят сетку калибровочных точек на поверхность объекта контроля и всех их нумеруют.
3.5.3. Имитируют излучение сигналов АЭ и регистрируют получаемые с помощью акустического местоуказателя разрушений отсчеты координат в каждой из калибровочных точек поочередно.
3.5.4. Сводят полученную информацию в таблицу предварительной калибровки (приложение 2).
Примечание. При контроле сложных конструкций сведения на калибровочной таблицы могут быть записаны и намять ЭВМ, а сопоставление получаемых отсчетов при контроле с данными калибровки автоматизировано.
3.6. Устанавливают чувствительность акустического местоуказателя разрушений максимально возможной, при которой еще не воспринимаются внешние помехи акустического и электромагнитного характера.
Примечание. В процессе контроля по мере необходимости последовательность регулируют.
3.7. Определяют, координаты дефектов по инструкции по эксплуатации на акустический местоуказатель разрушении.
4. ОБРАБОТКА РЕЗУЛЬТАТОВ КОНТРОЛЯ
4.1. Контроль одномерных объектов.
4.1.1. При контроле одномерных объектов результаты контроля представляют в виде гистограммы распределения количества отсчетов координат по длине контролируемого объекта. Пики гистограммы отождествляют с РД, а по временным задержкам τ, соответствующим этим пикам, вычисляют координату источников АЭ:
|
|
где v - скорость распространения сигналов АЭ в материале объекта.
4.2. Контроль плоскостных объектов.
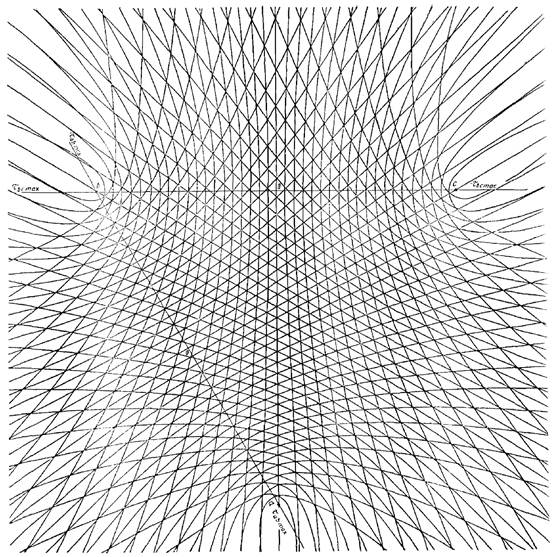
4.2.1. Обработку информации для определения местоположения РД в плоскостных объектах сводят к нанесению па координатную плоскость точек, соответствующих полученным отсчетам задержек. В приложениях 4 и 5 приведены гиперболические координатные сетки для двух способов расположения приемных преобразователей. Области c наивысшей плотностью нанесенных точек соответствуют местам расположения РД.
Примечание. В том случае, если используемая аппаратура для контроля объектов содержит блоки преобразования или пересчета координат из гиперболической системы в прямоугольную, то аналогичные построения производят на прямоугольной координатной сетке вручную или автоматически в зависимости от возможностей аппаратуры для контроля объектов.
4.3. Контроль замкнутых поверхностей.
4.3.1. Отсчеты координат на замкнутых поверхностях откладывают на изображениях их развертки.
4.4. Контроль объектов сложных форм.
4.4.1. Результаты контроля объектов сложных форм обрабатывают путем сопоставления получаемых отсчетов с данными предварительной калибровки поверхности (приложение 2).
4.5. Для уточнения местоположения РД после окончания контроля объекта проводят дополнительную калибровку путем перемещения излучателя имитатора АЭ по поверхности объекта с целью поиска мест, из которых отсчеты координат от имитатора и полученные от РД в процессе контроля совпадут. Результаты дополнительной калибровки сводятся в таблицу (приложение 3).
5. ОФОРМЛЕНИЕ РЕЗУЛЬТАТОВ КОНТРОЛЯ
5.1. Результаты контроля должны быть зафиксированы и журнале или заключении, или на схеме объекта контроля, где должны быть указаны: тип, форма, размеры объекта контроля (тип сварного соединения швов), область проконтролированного участка; условия, при которых выполнялся контроль (присутствие неустраненных источников акустических и электромагнитных помех); тип акустического местоуказателя разрушений; номинальное значение рабочей частоты; чувствительность пьезопреобразователей к продольным волнам в рабочем диапазоне частот; частота повторения, длительность и амплитуда импульсов, используемых при имитации сигналов АЭ; результаты контроля; дата контроля; фамилия оператора, проводившего контроль.
ПРИЛОЖЕНИЕ 1
1. Одномерный объект
![]()
2. Плоскость

3. Кольцевой объект

4. Цилиндрический объект
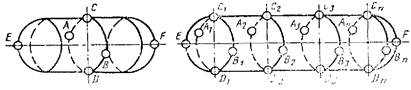
5. Сферический объект

ПРИЛОЖЕНИЕ 2
Таблица предварительной калибровки
|
Местоположение калиброванной точки |
Отсчеты координат при имитации АЭ |
Примечание |
|
|
x |
y |
||
|
1 |
2 |
3 |
4 |
|
|
|
|
|
ПРИЛОЖЕНИЕ 3
Таблица дополнительной калибровки
|
Отсчеты координат, полученные при контроле объекта |
Отсчеты координат при имитации |
Местоположение точки |
Примечание |
||
|
x |
y |
x |
y |
||
|
1 |
2 |
3 |
4 |
5 |
6 |
|
|
|
|
|
|
|
ПРИЛОЖЕНИЕ 4
ГИПЕРБОЛИЧЕСКАЯ КООРДИНАТНАЯ СЕТКА
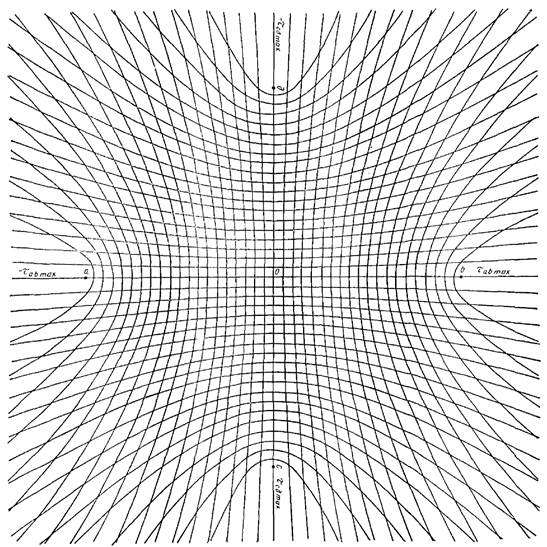
ПРИЛОЖЕНИЕ 5
ГИПЕРБОЛИЧЕСКАЯ КООРДИНАТНАЯ СЕТКА