 | Информационная система | |
ФЕДЕРАЛЬНОЕ АГЕНТСТВО
ПО ТЕХНИЧЕСКОМУ РЕГУЛИРОВАНИЮ И МЕТРОЛОГИИ
|
|
НАЦИОНАЛЬНЫЙ |
ГОСТ Р ИСО |

Вибрация
ВИБРАЦИЯ МАШИН ВРАЩАТЕЛЬНОГО
ДЕЙСТВИЯ С АКТИВНЫМИ МАГНИТНЫМИ
ПОДШИПНИКАМИ
Часть 2
Оценка вибрационного состояния
ISO 14839-2:2004
Mechanical vibration - Vibration of rotating machinery equipped
with active
magnetic bearings - Part 2: Evaluation of vibration
(IDT)
|
|
Москва Стандартинформ 2012 |

Цели и принципы стандартизации в Российской Федерации установлены Федеральным законом от 27 декабря 2002 г. № 184-ФЗ «О техническом регулировании», а правила применения национальных стандартов Российской Федерации - ГОСТ Р 1.0-2004 «Стандартизация в Российской Федерации. Основные положения»
Сведения о стандарте
1 ПОДГОТОВЛЕН Автономной некоммерческой организацией «Научно-исследовательский центр контроля и диагностики технических систем» (АНО «НИЦ КД») на основе собственного аутентичного перевода на русский язык международного стандарта, указанного в пункте 4
2 ВНЕСЕН Техническим комитетом по стандартизации ТК 183 «Вибрация, удар и контроль технического состояния»
3 УТВЕРЖДЕН И ВВЕДЕН В ДЕЙСТВИЕ Приказом Федерального агентства по техническому регулированию и метрологии от 9 ноября 2011 г. № 527-ст
4 Настоящий стандарт идентичен международному стандарту ИСО 14839-2:2004 «Вибрация. Вибрация машин вращательного действия с активными магнитными подшипниками. Часть 2. Оценка вибрационного состояния» (ISO 14839-2:2004 «Mechanical vibration - Vibration of rotating machinery equipped with active magnetic bearings - Part 2: Evaluation of vibration»).
При применении настоящего стандарта рекомендуется использовать вместо ссылочных международных стандартов соответствующие им национальные стандарты Российской Федерации и межгосударственные стандарты, сведения о которых приведены в дополнительном приложении ДА
5 ВВЕДЕН ВПЕРВЫЕ
Информация об изменениях к настоящему стандарту публикуется в ежегодно издаваемом указателе «Национальные стандарты», а текст изменений и поправок - в ежемесячно издаваемых информационных указателях «Национальные стандарты». В случае пересмотра (замены) или отмены настоящего стандарта соответствующее уведомление будет опубликовано в ежемесячно издаваемом информационном указателе «Национальные стандарты». Соответствующая информация, уведомление и тексты размещаются также в информационной системе общего пользования - на официальном сайте Федерального агентства по техническому регулированию и метрологии в сети Интернет
СОДЕРЖАНИЕ
В настоящем стандарте рассматриваются вопросы, связанные с оценкой технического состояния машины по результатам измерений вибрации ротора, а также измерений тока и напряжения в управляющих катушках машины с активными магнитными подшипниками (АМП) при ее работе в номинальном установившемся режиме без учета значений этих параметров в переходном режиме при прохождении критических частот вращения. Вибрация машины в области критической частоты вращения рассматривается в ИСО 108141) через характеристики модальной чувствительности, что выходит за рамки настоящего стандарта.
______________
1) Введен как ГОСТ 31186-2002 (ИСО 10814:1996) «Вибрация. Подверженность и чувствительность машин к дисбалансу».
Для подшипников скольжения с жидкостной смазкой характерна высокая жесткость опоры при малом радиальном зазоре (порядка 0,1 % радиуса цапфы ротора), что обусловливает требование достаточно низкой вибрации, не допускающей прорыва валом ротора слоя смазки и его касания металлической втулки подшипника. В АМП, напротив, жесткость опоры относительно мала, а зазор, соответственно, велик (до 0,5 % радиуса цапфы ротора), поэтому более высокий уровень вибрации ротора в АМП является вполне естественным и допустимым. Меньшая жесткость опоры АМП означает и более низкую вибрацию, переданную на фундамент машины. Поэтому по сравнению со стандартами по оценке вибрационного состояния машин с подшипниками жидкостного трения (серия ИСО 7919-1) в настоящем стандарте установлены более высокие значения границ зон вибрационного состояния.
ГОСТ Р ИСО 14839-2-2011
НАЦИОНАЛЬНЫЙ СТАНДАРТ РОССИЙСКОЙ ФЕДЕРАЦИИ
Вибрация
ВИБРАЦИЯ МАШИН ВРАЩАТЕЛЬНОГО ДЕЙСТВИЯ С АКТИВНЫМИ МАГНИТНЫМИ ПОДШИПНИКАМИ
Часть 2
Оценка вибрационного состояния
Vibration. Vibration of rotating machinery equipped with active magnetic bearings. Part 2. Evaluation of vibration
Дата введения - 2012-09-01
1 Область применения
Настоящий стандарт устанавливает общее руководство по проведению измерений и оценке состояния машин вращательного действия с активными магнитными подшипниками (АМП), определяемого по характеристикам:
- перемещений вала вблизи АМП;
- напряжения/тока, измеренным на катушке управления или на выходе усилителя мощности АМП.
Обе характеристики измеряют в нормальном режиме работы машины в лаборатории ее изготовителя или на месте эксплуатации. Критерии оценки состояния основаны на абсолютных значениях характеристик для установившегося режима работы машины, а также на возможных изменениях этих характеристик во времени.
Настоящий стандарт распространяется на промышленные машины вращательного действия с потребляемой или генерируемой мощностью свыше 15 кВт без ограничений по их размерам и рабочей частоте вращения (такие как турбокомпрессоры, турбонасосы, паровые турбины, турбогенераторы, турбовентиляторы, электроприводы и пр., в состав которых входят роторы на АМП), за исключением машин с малогабаритными роторами, например, шпинделями, маховиками, роторами турбомолекулярных насосов.
Настоящий стандарт распространяется на машины как с жесткими, так и с гибкими роторами.
2 Нормативные ссылки
В настоящем стандарте использована нормативная ссылка на следующий стандарт:
ИСО 7919-1 Вибрация машин без возвратно-поступательного движения. Измерения на вращающихся валах и критерии оценки состояния. Часть 1. Общее руководство (ISO 7919-1, Mechanical vibration of non-reciprocating machines - Measurements on rotating shafts and evaluation criteria - Part 1: General guidelines)
3 Принципы измерения параметров и оценки состояния
3.1 Описание системы «ротор - АМП»
Типичная система «ротор - АМП» показана на рисунке 1. АМП расположен на каждом конце вала и включает в себя датчики перемещения и страхующий шариковый подшипник. Осевой АМП на рисунке 1 не показан. Система управления АМП показана на рисунке 2. Каждый датчик перемещения системы управления передает сигнал, содержащий информацию о положении ротора в подшипнике (отклонении от центра подшипника), на контроллер. Контроллер может представлять собой ПИД-регулятор. Управляющий сигнал с контроллера поступает на усилитель мощности и определяет выходной ток усилителя, поступающий в катушку управления АМП. Если вал смещается вниз, то в верхней катушке возбуждается ток, создающий магнитную силу, поднимающую вал вверх. Точно такой же механизм действует для поддержания вала в его номинальном положении внутри подшипника, поэтому система управления обеспечивает одновременно и левитацию ротора, и подавление его вибрации.

1 - АМП; 2 - датчик перемещения; 3 - страхующий подшипник; 4 - зазор АМП
Рисунок 1 - Ротор на активных магнитных подшипниках

1 - АМП; 2 - датчик перемещения; 3 - усилитель
мощности; 4 - контроллер;
5 - управляющий сигнал; 6 - опорный сигнал
Рисунок 2 - Схема системы управления АМП
3.2 Перемещение
В настоящем стандарте термин «перемещение» означает общее отклонение положения вала, включая статическое смещение, от центра подшипника. Вибрация стационарных элементов машины (например, подшипниковых корпусов) в настоящем стандарте не рассматривается.
В состав радиального АМП входят собственные датчики перемещения для измерения перемещений x(t) и y(t) в двух взаимно перпендикулярных направлениях (см. рисунок 3). Поэтому дополнительных датчиков перемещения для измерения вибрации вала не требуется. В настоящем стандарте рассматриваются результаты измерений вибрации вала собственными датчиками АМП.

1 - корпус; 2 - вал; 3 - датчик перемещения
Рисунок 3 - Датчики перемещения АМП
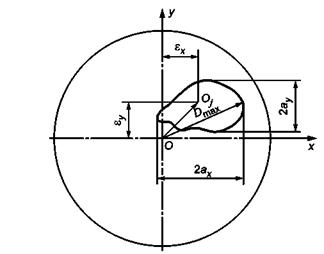
Как видно из рисунка 3, у радиального подшипника измерительные оси датчиков совпадают с осями х и у. Сигналы этих датчиков позволяют определить положение оси ротора в каждый момент времени, включая постоянное смещение (эксцентриситет) и переменную составляющую (орбиту прецессии вала), как показано на рисунке 4. На этом рисунке координаты постоянного смещения от центра зазора АМП (вектора, соединяющего точки О и Оj) обозначены eх и ey, а максимальные отклонения от постоянного смещения по осям х и у - соответственно eх и eу. Максимальное отклонение Dmax положения ротора от центра зазора АМП может быть рассчитано по формуле
![]() (1)
(1)
или, приближенно, по формуле
где xmax = ex + ax;
ymax = ey + ay.
Приближенная формула (2) обычно дает завышенную оценку Dmax, причем погрешность оценки может достигать приблизительно 40 %.
Получить оценку Dmax по сигналам двух датчиков перемещения на основе формулы (1) или (2) довольно сложно, так как для этого нужно располагать цифровым осциллографом или другим аналогичным прибором. Упрощенно можно определить максимальное отклонение в каждом из ортогональных направлений по временной форме сигнала, как показано на рисунке 4, и использовать оценку
Dmax > max[xmax, ymax]. (3)
Применение формулы (3) обычно дает заниженную оценку Dmax.
Чтобы предотвратить контакт ротора со статором, должно выполняться (с некоторым запасом) следующее неравенство
где Cmin-radial - минимальный радиальный зазор в подшипнике.
В настоящем стандарте значение параметра Dmax используется как показатель для оценки запаса зазора.
а) Орбита прецессии вала

b) Временные сигналы датчиков перемещения
t - время; а - период вращения вала
Рисунок 4 - Орбита прецессии вала и соответствующие широкополосные сигналы вибрации
Аналогично для оценки запаса осевого зазора проводят измерения перемещения ротора в осевом направлении z и сравнивают максимальное осевое перемещение Dmax = zmax с минимальным осевым зазором Cmin-axial. В этом случае должно выполняться неравенство
Dmax < Сmin-axial, (5)
Измерения перемещений в осевом и радиальных направлениях должно быть выполнено в заданных условиях нагрузок и частот вращения ротора. Обычно их проводят по достижении определенного температурного режима и заданных рабочих характеристик машины. Важно иметь в виду, что показатель Dmax определяют только в заданном установившемся режиме работы машины, включающем возможные небольшие изменения нагрузки. Дополнительно измерения этой величины могут быть проведены в условиях, отличных от заданных, или в переходных режимах работы машины, например на низких частотах вращения, при изменении частоты вращения с прогревом машины, на критических частотах вращения или в процессе останова. Однако результаты таких измерений не могут быть использованы для получения оценки вибрационного состояния в соответствии с настоящим стандартом.
3.3 Напряжение и сила тока
В настоящее время отсутствуют достаточные данные, позволяющие установить надежные критерии оценки состояния электрической части АМП по измерениям напряжения и тока в управляющих катушках. В связи с этим настоящий стандарт не приводит критериев оценки по этим параметрам, но некоторая информация по их использованию приведена в приложениях А, В и С.
4 Критерии оценки
4.1 Общие положения
Настоящий стандарт устанавливает два критерия оценки вибрационного состояния по перемещениям цапф ротора в АМП. Первый критерий основан на абсолютных значениях перемещения, а второй - на изменениях этих значений безотносительно к направлению изменений (в сторону возрастания или убывания).
4.2 Критерий I
Надежная работа машин с АМП требует выполнения неравенств (4) и (5), отсутствия механического контакта между ротором и стационарными частями машины (например, статорами АМП, датчиками перемещений, элементами лабиринтных уплотнений). Минимальный радиальный зазор Cmin-radial может быть определен как минимальный зазор среди всех радиальных направлений при стационарном движении ротора. Зазор в страхующих подшипниках обычно обусловлен их конструкцией.
В случае АМП предельные значения для критерия I устанавливают только исходя из требования сохранения достаточного запаса зазора при движении ротора. Остальные требования, установленные в ИСО 7919-1 для контроля вибрации ротора и связанные с динамическими нагрузками на подшипники и ограничением сил, передаваемых на опору машины, в случае АМП несущественны ввиду бесконтактного характера опоры и ее большей упругости по сравнению с подшипниками жидкостного трения. В связи с этим для установленного настоящим стандартом критерия отсутствует зависимость от частоты вращения ротора, и, таким образом, данный критерий применим во всем диапазоне частот вращения.
ИСО 7919-1 установил зоны вибрационного состояния для контроля вибрации вала в подшипниках жидкостного трения, определяемые следующим образом:
- зона А: типичные значения вибрации новых машин, вводимых в эксплуатацию;
- зона В: типичные значения вибрации машин, которые считают годными к долговременной работе без ограничений;
- зона С: типичные значения вибрации машин, которые считают непригодными к долговременной работе (обычно работу таких машин допускают в течение ограниченного времени, пока не появится возможность устранения причин, вызвавших изменение состояния машины);
- зона D: типичные значения вибрации, которую обычно рассматривают как представляющую опасность с точки зрения вызываемых ею возможных повреждений машины.
Границы таких зон для машин с АМП, установленные на основе накопленного международного опыта их эксплуатации, приведены в таблице 1 и представлены в графическом виде на рисунке 5.
Значения границ зон состояния не предназначены служить в качестве критериев приемки машин. Такие критерии должны являться предметом соглашения заинтересованных сторон. Однако установление настоящим стандартом границ зон состояния позволит избежать предъявления завышенных требований к вибрации машины и чрезмерных затрат на их обеспечение. Значения границ можно также использовать в качестве ориентиров при установлении процедур контроля состояния и диагностирования машин и при построении уровней предупреждения и останова (общие сведения о построении уровней предупреждения и останова приведены в ИСО 7919-1).
Таблица 1 - Рекомендуемые значения границ зон вибрационного состояния
|
Максимальное отклонение Dmax |
|
|
А/В |
< 0,3Cmin |
|
В/С |
< 0,4Cmin |
|
C/D |
< 0,5Cmin |
|
Примечание - Cmin - минимальный радиальный или осевой зазор между ротором и статором. |
|

X - минимальный радиальный зазор Cmin, мкм; Y - максимальное
отклонение Dmax, мкм;
а - отношение Dmax/Cmin
Рисунок 5 - Границы зон вибрационного состояния
4.3 Критерий II
Критерий основан на сравнении измеренного значения широкополосной вибрации с предварительно установленным базовым уровнем. Существенные изменения вибрации могут потребовать принятия мер даже в том случае, когда граница зоны С по критерию I еще не достигнута. Такие изменения, будь они скачкообразными или постепенно нарастающими во времени, могут свидетельствовать о зарождении повреждений или других неполадках.
Критерий II применяют для установившегося режима работы машины. При этом важно, чтобы подлежащие сравнению результаты измерений были получены приблизительно в одних и тех же условиях для одного и того же режима. Под существенным отклонением рекомендуется понимать значение, не превышающее верхнюю границу зоны В (см. таблицу 1). Превышение установленного критерия требует выяснения причины столь существенных изменений вибрации и принятия соответствующего решения.
Приложение А
(справочное)
Пример
эксплуатации центробежного компрессора низкого
давления с активными магнитными подшипниками
А.1 Центробежный компрессор низкого давления
На рисунке А.1 схематично изображен ротор центробежного компрессора низкого давления с формами мод собственных колебаний, построенных исходя из типичных (средних) значений жесткости опоры с АМП. Компрессор имеет семь ступеней, образуемых лопастями ротора. Его масса равна 780 кг. Номинальная частота вращения ротора равна 10900 мин-1 (182 Гц), а номинальная мощность на валу компрессора - 4120 кВт. Эти и другие технические характеристики компрессора приведены в таблице А.1.

1 - первая мода; 2 - вторая мода; 3 - третья мода; 4 - четвертая мода; 5 - АМП
Примечание - Рабочая частота вращения N находится между собственными частотами 3-й и 4-й мод собственных колебаний ротора. АМП расположены вне узлов основных мод колебаний ротора, что обеспечивает необходимую управляемость колебаниями ротора.
Рисунок А.1 - Моды собственных колебаний ротора центробежного компрессора низкого давления
Таблица А.1 - Технические характеристики компрессора
|
Секция низкого давления |
Секция высокого давления |
|
|
Модель |
МСН 527 |
МСН 508 |
|
Рабочая среда |
Газ, обогащенный водородом |
|
|
Расход, м3/ч |
43691 |
43486 |
|
Давление всасывания, МПа |
0,33 |
0,79 |
|
Давление нагнетания, МПа |
0,91 |
2,03 |
|
Номинальная частота вращения N, мин-1 (Гц) |
10900 (182) |
|
|
Рабочий диапазон частот вращения, мин-1 |
От 9625 до 11445 |
|
|
Мощность на валу, кВт |
4120 |
|
|
Мощность привода, кВт |
5300 |
|
В таблице А.2 приведены технические характеристики АМП, среди которых длина цапфы в АМП L = 150 мм, диаметр цапфы D = 2R = 147 мм, радиальный зазор АМП С = 500 мкм. D/L = 0,98, C/R = 0,0068.
Таблица А.2 - Технические характеристики АМП
|
Секция низкого давления |
Секция высокого давления |
|
|
Радиальный подшипник |
||
|
Диаметр D, мм |
147 |
147 |
|
Длина L, мм |
150 |
150 |
|
Нагрузка, Н |
3822 |
4557 |
|
Допускаемая нагрузка, Н |
10340 |
10340 |
|
Зазор С, мкм |
500 |
500 |
|
Страхующий радиальный подшипник |
||
|
Зазор С, мкм |
230 |
230 |
Радиальный зазор страхующего подшипника, предотвращающего касание ротора АМП, равен 230 мкм, т.е. около половины радиального зазора АМП. Тогда минимальный радиальный зазор, используемый для оценки вибрационного состояния в соответствии с настоящим стандартом, равен Cmin = 230 мкм.
А.2 Анализ критических частот вращения ротора
Анализ критических частот вращения ротора - один из важнейших аспектов его проектирования. Динамика ротора на магнитном подвесе значительно отличается от поведения ротора в подшипниках жидкостного трения. Это становится очевидным при расчете критических частот вращения ротора в зависимости от жесткости его опор и отображения полученных результатов в безразмерных единицах графически, как показано на рисунке А.2. По вертикальной оси отложены отношения собственных частот колебаний ротора к частоте первой моды его собственных изгибных колебаний при незакрепленных концах. По горизонтальной оси - отношение жесткости подшипниковой опоры к жесткости вала. На рисунке А.2 показаны также кривые изменения с частотой (относительной) относительных жесткостей подшипника жидкостного трения и АМП.

1 - АМП; 2 - подшипник жидкостного трения; X - отношение жесткости
подшипника к жесткости вала;
Y - отношение частоты собственных колебаний к частоте первой моды
собственных изгибных колебаний
с незакрепленными концами
Примечание - Критические частоты вращения NCi определяются пересечением кривых собственных частот (относительных) для разных мод собственных колебаний с кривыми жесткости (относительной) для подшипников с жидкостным трением и АМП. Диапазоны возможных рабочих частот расположены между этими критическими частотами (с некоторым запасом) и показаны на рисунке в виде затемненных областей (А1 и А2 - для компрессоров с АМП; В1 и В2 - для компрессоров с подшипниками жидкостного трения).
Рисунок А.2 - Типичный портрет критических частот вращения
однородного вала,
эквивалентного ротору центробежного компрессора низкого давления
Из рисунка А.2 видно, что типичная жесткость подшипника жидкостного трения высока по сравнению с жесткостью вала. Режим работы компрессора обычно рассматривают как закритический, если рабочая частота вращения ротора превышает NС1, например, если рабочие частоты лежат в некоторой области, обозначенной В2, между критическими частотами вращения NС1 и NС2, полученными пересечением кривых изменения собственной частоты (относительной) для первой и второй мод собственных колебаний с кривой относительной жесткости (в данном случае для подшипника жидкостного трения).
Типичная жесткость АМП мала по сравнению с жесткостью вала. Поэтому в случае компрессора на АМП режим его работы рассматривают как закритический, если рабочая частота вращения ротора превышает NC3, например, если рабочие частоты лежат в некоторой области, обозначенной А2, между критическими частотами вращения NC3 и NС4.
Типичная кривая зависимости максимального перемещения ротора на АМП от частоты его вращения показана на рисунке А.3. Эта кривая имеет пики на собственных частотах NC1, NC2, NC3 и NC4. Первые две моды собственных колебаний соответствуют колебаниям на критических частотах жесткого ротора (первая мода характеризуется плоскопараллельным движением ротора, вторая мода - колебаниями концов ротора в противофазе). Третья критическая частота вращения - это частота первой моды собственных изгибных колебаний ротора с незакрепленными концами.

1 - частота вращения ротора; 2 - максимальное перемещение
Рисунок А.3 - Зависимость максимального перемещения ротора от частоты вращения
Поскольку рабочая частота вращения N ротора компрессора с АМП находится в области между третьей и четвертой критическими частотами вращения, то при разгоне ротор проходит три области резонанса, что налагает определенные требования к демпфированию в системе «ротор - опора». Вопросы поведения ротора вблизи резонансов рассматриваются в ИСО 10814.
А.3 Испытания, проведенные изготовителем
Изготовителем компрессора были проведены испытания для подтверждения заявленных рабочих характеристик в соответствии с требованиями американского стандарта ASME РТС 10 и испытания для определения вибрационных характеристик в соответствии с ИСО 10439. Результаты испытаний в виде построенных зависимостей максимального перемещения ротора от частоты вращения показаны на рисунке А.4. Вследствие высокоточной балансировки ротора его максимальное перемещение Dmax не превысило 10 мкм. Такое значение было бы достаточно большим для компрессоров на подшипниках жидкостного трения, однако для компрессоров с АМП данная вибрация является вполне удовлетворительной.

X - частота вращения ротора, мин; Y - максимальное
перемещение, мкм;
LP - ротор секции низкого давления; HP - ротор секции
высокого давления
Рисунок А.4 - Зависимость максимального перемещения ротора от
частоты вращения,
полученная при испытаниях изготовителем компрессора
Отношение максимального перемещения к минимальному зазору [Dmax/Cmin = 10/230] оказалось менее 0,3. Таким образом, результаты испытаний показали, что согласно таблице 1 вибрационное состояние компрессора соответствует зоне А.
А.4 Измерения вибрации на месте эксплуатации
После поставки машины заказчику компрессор постоянно находился в работе, включая регулярные процедуры его технического обслуживания после каждых шести месяцев эксплуатации. Пример результатов измерений вибрации на месте эксплуатации компрессора приведен на рисунке А.5. Видно, что максимальное перемещение Dmax не превышало 30 мкм. Столбиковая диаграмма на рисунке А.6 показывает примеры данных в нормальном стационарном режиме работы компрессора.

X - время, ч; Y - максимальное перемещение, мкм; а - d - радиальное
перемещение вала;
е - осевая вибрация вала
Рисунок А.5 - Результаты измерений вибрации на месте эксплуатации
Измеренное перемещение много ниже минимального радиального зазора Cmin = 230 мкм. Поскольку отношение [Dmax/Cmin = 30/230] по-прежнему менее 0,3, то вибрационное состояние машины продолжает соответствовать зоне А.
А.5 Измерения тока на месте эксплуатации
На месте эксплуатации проводились измерения тока катушки управления и их результаты показаны на столбиковой диаграмме (рисунок А.6).
Поскольку измерения проводились только тока, усредненного по времени, данные о его динамической составляющей отсутствуют. Однако можно утверждать, что благодаря применению системы управления АМП с подавлением дисбаланса запас по току оставался достаточно большим (см. приложение В).

1 - АМП; 2 - верхняя катушка; 3 - нижняя катушка; 4
- ротор секции высокого давления;
5 - ротор секции низкого давления; Min - нижняя граница диапазона рабочих частот вращения;
MCS - максимальная частота вращения в стационарном режиме; Y - сила тока в катушке
управления, А;
Y¢ - максимальное
перемещение, мкм
Примечание - Класс А работы усилителя мощности обеспечивает постоянный ток 30 А для нижней и верхней катушек управления. Разность тока в верхней и нижней катушке обеспечивает левитацию ротора.
Рисунок А.6 - Столбиковая диаграмма результатов измерений вибрации
ротора и
тока катушки управления
А.6 Сравнение со стандартами для подшипников жидкостного трения
Для компрессора с АМП, рассматриваемого в настоящем приложении, размах перемещения, измеренного на месте эксплуатации компрессора, равен примерно 60 мкм (удвоенное максимальное перемещение Dmax). Если этот результат рассматривать с позиции общеупотребительных критериев для подшипников жидкостного трения, то заключение о вибрационном состоянии машины могло бы быть иным, например:
a) ИСО 7919-3 устанавливает значения границ зон вибрационного состояния по размаху перемещения Sp-p в зависимости от частоты вращения ротора N и с учетом того, что для рассматриваемого компрессора верхняя граница диапазона рабочих частот вращения равна N = 11445 мин-1, значения верхних границ зон А и В будут равны:
зона A: Sp-p = 4800/ÖN = 45 мкм,
зона В: Sp-p = 9000/ÖN = 84 мкм.
Таким образом, если руководствоваться критерием по ИСО 7919-3, то рассматриваемый компрессор находился бы в зоне вибрационного состояния В.
b) ИСО 10439, посвященный центробежным компрессорам, устанавливает
критерий приемки по размаху перемещения Lv для диапазона рабочих частот вращения в виде непревышения меньшей
из двух величин: 25,4 мкм или  , где Nmc -
верхняя граница диапазона. В случае Nmc = 11445
мин-1 вторая величина принимает значение
, где Nmc -
верхняя граница диапазона. В случае Nmc = 11445
мин-1 вторая величина принимает значение ![]() =
26,6 мкм, т.е. размах перемещения не должен превышать значения первой величины (25,4
мкм). Компрессор с АМП с размахом перемещения приблизительно 60 мкм критерию
приемки по ИСО 10439 не удовлетворяет.
=
26,6 мкм, т.е. размах перемещения не должен превышать значения первой величины (25,4
мкм). Компрессор с АМП с размахом перемещения приблизительно 60 мкм критерию
приемки по ИСО 10439 не удовлетворяет.
Из этих примеров видно, что критерии стандартов для машин с подшипниками жидкостного трения нельзя использовать для машин с АМП. Вместо них следует использовать критерии, установленные настоящим стандартом.
Приложение В
(справочное)
Пример оценки состояния машины по измерениям силы тока
В.1 Измерения тока
Усилитель мощности подает ток на катушки АМП в соответствии с сигналом управления, как показано на рисунке 2. Пример принципиальной схемы усилителя мощности с широтно-импульсной модуляцией (ШИМ-усилителя) показан на рисунке В.1. Входной сигнал системы управления управляет током I(t), подаваемым на электромагнитную катушку L. Этот ток контролируют в цепи обратной связи, используя зависимость
I(t) = Vf(t)/Rf(t),
где Vf(t) - напряжение в цепи обратной связи;
Rf(t) - сопротивление цепи обратной связи.

1 - входной сигнал управления; 2 - монитор силы тока; 3
- драйвер ШИМ-усилителя:
4 - источник постоянного напряжения Vcc
Рисунок В.1 - Система управления АМП с ШИМ-усилителем
На выходе монитора силы тока наблюдают временную форму сигнала I(t), показанную на рисунке В.2.

а) Система управления без подавления дисбаланса

b) Система управления с подавлением дисбаланса
X - время t; Y - сила тока I(t), А; а - период оборота вала
Рисунок В.2 - Сигналы силы тока
Предполагается, что при отсутствии вибрации ротора сила тока будет приблизительно постоянной и иметь значение I0 (на рисунке В.2 показано пунктирной линией), необходимое для поддержания левитации ротора. Однако обычно наблюдаемый на мониторе сигнал силы тока I(t) (на рисунке В.2 показан сплошной линией) имеет переменную составляющую и включает в себя реакцию системы управления АМП. При использовании системы управления без подавления дисбаланса типичный сигнал тока будет иметь вид, показанный на рисунке В.2а). При использовании системы управления с подавлением дисбаланса типичный сигнал тока будет иметь вид, показанный на рисунке В.2b). На нем видно, что переменная составляющая, синхронная с вращением ротора, отсутствует.
Для повышения точности измерения силы тока можно применять фильтр нижних частот с частотой среза, не менее чем в два раза превышающей частоту вращения ротора.
В.2 Оценка состояния по сигналу тока
В качестве показателя состояния может быть использовано максимальное значение Imax сигнала силы тока I(t) в управляющей катушке АМП, измеренное в нормальном режиме работы машины, которое должно удовлетворять критерию
Imax = max[I(t)] < Iс,
где Ic - запас усилителя мощности по току.
Данный критерий рекомендуется применять к каждой катушке управления АМП.
Приложение С
(справочное)
Ограничение в системе управления
С.1 Общие положения
Помимо вибрации существуют другие важные параметры, которые необходимо удерживать в допустимых пределах. Такими параметрами являются, в частности, температура исполнительных устройств и элементов электронной схемы, ток в катушках управления, напряжение управления на выходе усилителей мощности. Температура является важным фактором, влияющим на общую надежность системы. Понятно также, что большой ток в катушке управления свидетельствует о приближении к пределу нагружения подшипника. В то же время причины и последствия насыщения усилителя мощности по напряжению не столь очевидны. При большом насыщении возможны ситуации, когда радиальная вибрация невелика, но в действительности машина находится на границе области безопасного функционирования с большой вероятностью внезапного нежелательного изменения динамики ротора.
В настоящем приложении рассматривается насыщение усилителя мощности по напряжению и связанные с этим явлением эффекты. При этом никакие критерии насыщения не устанавливаются, поскольку допустимый уровень ограничения управления зависит от конкретного применения машины с АМП, конструкции системы управления и причины ограничения. Тем не менее важно, чтобы поставщик АМП уделил внимание данной проблеме при проектировании и испытании подшипников и предоставил гарантии, что при работе подшипников не будут наблюдаться нежелательные эффекты, рассматриваемые в настоящем приложении. Обычно таких эффектов удается избежать при правильном проектировании подшипников. Однако во многих случаях необходимо убедиться, что напряжение на выходе усилителя мощности при работе АМП в составе конкретной машины не превышает некоторого уровня. Иногда для гарантии безопасной работы машины в разных рабочих условиях необходим непрерывный контроль ограничения в системе управления.
С.2 Работа усилителя мощности
Обычно для подачи тока на управляющие катушки АМП используют коммутирующие усилители, подобные показанному на рисунке С.1. Опорный сигнал вычисляют с помощью соответствующего алгоритма позиционирования ротора в АМП, а усилитель мощности обеспечивает максимальную близость действительного сигнала тока к опорному. Частота коммутации усилителя составляет десятки килогерц. Переключатели питания (S1, S2) обычно выполняют на полевых МОП-транзисторах или биполярных транзисторах с изолированным затвором. Усилитель работает таким образом, что при протекании тока через переключатели напряжение на катушке управления равно постоянному напряжению шины питания положительной полярности, а скорость нарастания протекающего через катушку тока определяется этим напряжением и индуктивностью катушки. Когда же транзисторы переключателей заперты, то напряжение на катушке управления равно постоянному напряжению шины питания отрицательной полярности, а ток в катушке убывает. Причем скорость убывания тока равна скорости его нарастания. Если ток протекает только через один переключатель, то напряжение на катушке практически равно нулю и ток остается постоянным.

1 - напряжение питания положительной полярности; 2 -
напряжение питания отрицательной полярности;
3 - опорный сигнал; 4 - сигнал тока; 5 - логическое устройство
управления; 6 - драйвер управления
затвором; 7 - точка измерения тока; 8 - напряжение на катушке
управления; 9 - электромагнит;
S1, S2 - переключатели
Рисунок С.1 - ШИМ-усилитель
Эффективное напряжение на катушке равно среднему напряжению на катушке за один период коммутации. Из рисунка С.1 видно, что эффективное напряжение на катушке находится в диапазоне между напряжениями шин питания положительной и отрицательной полярностей. Этим определяется и максимальная скорость изменения тока. Таким образом, ограничения по току и магнитной силе в подшипнике определены напряжением шины питания (см. рисунок С.2).

X - частота (в линейном масштабе); Y - максимальная
магнитная сила (в линейном масштабе);
а - частота излома характеристики
Примечание - Ниже частоты излома допустимая нагрузка ограничена насыщением магнитной цепи и максимальным током на выходе усилителя мощности. Выше частоты излома допустимая нагрузка ограничена напряжением питания. В этой области максимальная магнитная сила обратно пропорциональна частоте.
Рисунок С.2 - Зависимость допустимой нагрузки АМП от частоты сигнала
При нормальной работе АМП скорость изменения опорного сигнала меньше максимальной скорости изменения тока, которую способен обеспечить усилитель мощности, поэтому ток в катушке управления успевает отслеживать изменения опорного сигнала. Однако если требуется более резкое изменение опорного сигнала, то ток в катушке за ним не успевает и начинает запаздывать. Возникает задержка по фазе. Эта задержка ухудшает динамику подшипника. Далее в настоящем приложении будут рассмотрены различные последствия эффекта насыщения по напряжению.
С.3 Высокочастотное насыщение усилителя
К насыщению по напряжению ведет сигнал возмущения большой амплитуды на высокой частоте. Насыщение усилителя существенно ухудшает динамику подшипниковой опоры, поскольку такой усилитель вносит задержку по фазе на любой частоте, а не только на частоте возмущения, вызвавшего насыщение. Возмущение может быть вызвано, например, поврежденной поверхностью датчика перемещения, обусловливающей появление высших гармоник частоты вращения, или просто неуравновешенностью ротора в сочетании с неэффективной работой компенсатора дисбаланса. В случае неэкранированного АМП возмущение может быть связано с работой внешнего электронного устройства, такого как частотный преобразователь. Необходимо отметить, что хорошо спроектированный АМП допускает относительно большое ограничение по напряжению, прежде чем проявится нестабильность поведения ротора.
С.4 Нестабильность динамики ротора
Одно из ограничений управления связано с неподходящим выбором алгоритма управления, приводящего к нестабильным режимам автоколебания ротора или поперечным резонансным колебаниям статора. Автоколебания или амплитуда вибрации нарастают до тех пор, пока не вызовут насыщение усилителя по напряжению, после чего, даже если автоколебания или вибрация относительно невелики, происходит ухудшение динамики ротора и, в худшем случае, возбуждение других форм колебаний. Риск появления такой ситуации должен быть исключен правильным выбором алгоритма управления.
С.5 Высокоамплитудная нестабильность
Другой возможный сценарий развития нестабильности может быть связан с тем, что система управления АМП хорошо отслеживает только возмущения малой амплитуды. Если же амплитуда возмущений велика, то в системе управления генерируются колебания. В процессе испытаний такие высокоамплитудные возмущения могут быть моделированы электрическим сигналом, например, от внешнего генератора. Другой вариант - механическое возбуждение, например, посредством ударов по ротору или статору резиновым молотком. При этом, если выбран неподходящий усилитель, возможно появление сильных колебаний системы АМП в целом (как единого жесткого тела). Риск данного сценария возрастает, если граничная частота системы управления с обратной связью лежит выше частоты излома характеристики, показанной на рисунке С.2, и запас устойчивости по фазе в системе управления недостаточен. Однако более вероятным будет возбуждение высокоамплитудных упругих мод колебаний ротора или статора. Причина этого в наличии фазовой задержки, связанной с насыщением по напряжению, в сочетании со слишком малым запасом устойчивости по фазе в цепи системы управления.
С.6 Прохождение критической частоты вращения
Прохождение критической частоты изгибных колебаний также ведет к насыщению по напряжению в случае, если эта частота находится выше частоты излома характеристики, показанной на рисунке С.2. В этом случае даже при относительно малом ограничении возможно быстрое нарастание амплитуды автоколебаний ротора в подшипнике. Предотвратить такой эффект можно при наличии системы мониторинга, не допускающей эффекта насыщения по напряжению и, соответственно, превышения допустимых динамических нагрузок на подшипник.
С.7 Измерение уровня ограничения
В принципе эффективное напряжение на катушке можно измерить непосредственно в точках соединения контроллера АМП с катушкой электромагнита. Однако предпочтительнее измерять эту величину по выходному сигналу логического устройства управления (см. рисунок С.1). Напряжение на катушке может быть оценено также по опорному сигналу с использованием дифференцирующей цепи.
В процессе испытаний измеренное эффективное напряжение на катушке может быть отображено в форме временного сигнала, по которому можно сделать вывод о приемлемости управления. Однако если в системе управления предусмотрен автоматический мониторинг насыщения по напряжению, то для оценки уровня ограничения целесообразно использовать простой числовой показатель. Таким показателем может быть, например, отношение максимального абсолютного значения напряжения на катушке к напряжению питания. Другим возможным показателем может быть отношение интервала времени, когда усилитель мощности находится в состоянии насыщения, к общей продолжительности измерений.
Приложение ДА
(справочное)
Таблица ДА.1
|
Обозначение
ссылочного |
Степень |
Обозначение и
наименование соответствующего |
|
ИСО 7919-1:1996 |
IDT |
ГОСТ ИСО 7919-1-2002 «Вибрация. Контроль состояния машин по результатам измерений вибрации на вращающихся валах. Общие требования» |
|
Примечание - В настоящей таблице использовано следующее условное обозначение степени соответствия стандарта: - IDT - идентичный стандарт. |
||
Библиография
|
[1] |
ISO 7919-2, Mechanical vibration - Evaluation of machine vibration by measurements on rotating shafts - Part 2: Land-based steam turbines and generators in excess of 50 MW with normal operating speeds of 1500 r/min, 1800 r/min, 3000 r/min and 3600 r/min |
|
[2] |
ISO 7919-3, Mechanical vibration of non-reciprocating machines - Measurements on rotating shafts and evaluation criteria - Part 3: Coupled industrial machines |
|
[3] |
ISO 7919-4, Mechanical vibration of non-reciprocating machines - Measurements on rotating shafts and evaluation criteria - Part 4: Gas turbine sets |
|
[4] |
ISO 7919-5, Mechanical vibration of non-reciprocating machines - Measurements on rotating shafts and evaluation criteria - Part 5: Machine sets in hydraulic power generating and pumping plants |
|
[5] |
ISO 10439, Petroleum, chemical and gas service industries - Centrifugal compressors |
|
[6] |
ISO 10814, Mechanical vibration - Susceptibility and sensitivity of machines to unbalance |
|
[7] |
API 617, Axial and centrifugal compressors and expander-compressors for petroleum, chemical and gas industry services |
|
[8] |
ASME PTC 10, Performance test code on compressors and exhausters |
|
[9] |
Fukushima, Y. et al. Totally oil-less centrifugal compressor in oil refinery service. Proceedings of Advancement in Bearing and Seal Technologies, Calgary, Canada, 1994, pp. 18.1 - 18.36 |
|
[10] |
Habermann, H. and Brunet, M. The active magnetic bearing enables optimum control of machine vibrations. ASME Paper 85-GT-221, 1985 |
|
[11] |
Matsushita, O., Kanemitsu, Y., Azuma, T. and Fukushima, Y. Vibration criteria considered from case studies of active magnetic bearing equipped rotating machines. International Journal of Rotating Machinery, 6, No. 1,2000, pp. 66 - 78 |
|
[12] |
Shiraki, K. and Kanki, H. New vibration criteria for high speed/large capacity turbo machinery. Proceedings of Eighth Turbomachinery Symposium, 1979, pp. 59 - 70 |