 | Информационная система | |
|
ФЕДЕРАЛЬНОЕ
АГЕНТСТВО |
||
|
|
НАЦИОНАЛЬНЫЙ |
ГОСТ Р ИСО |

Вибрация
ИЗМЕРЕНИЯ
ВИБРОАКУСТИЧЕСКИХ
ПЕРЕДАТОЧНЫХ ХАРАКТЕРИСТИК УПРУГИХ
ЭЛЕМЕНТОВ КОНСТРУКЦИЙ
В ЛАБОРАТОРНЫХ УСЛОВИЯХ
Часть 1
Общие принципы измерений
ISO
10846-1:2008
Acoustics and vibration - Laboratory measurement of vibro-acoustic
transfer properties of resilient elements -
Part 1: Principles and guidelines
(IDT)
|
|
Москва |
Цели и принципы стандартизации в Российской Федерации установлены Федеральным законом от 27 декабря 2002 г. № 184-ФЗ «О техническом регулировании», а правила применения национальных стандартов Российской Федерации - ГОСТ Р 1.0-2004 «Стандартизация в Российской Федерации. Основные положения»
Сведения о стандарте
1. ПОДГОТОВЛЕН Автономной некоммерческой организацией «Научно-исследовательский центр контроля и диагностики технических систем» (АНО «НИЦ КД») на основе собственного аутентичного перевода международного стандарта, указанного в пункте 4
2. ВНЕСЕН Техническим комитетом по стандартизации ТК 183 «Вибрация и удар»
3. УТВЕРЖДЕН И ВВЕДЕН В ДЕЙСТВИЕ Приказом Федерального агентства по техническому регулированию и метрологии от 12 ноября 2010 г. № 442-ст
4. Настоящий стандарт является идентичным международному стандарту ИСО 10846-1:2008 «Вибрация и акустика. Лабораторные измерения виброакустических передаточных свойств упругих элементов. Часть 1. Общие принципы и руководство» (ISO 10846-1:2008 «Acoustics and vibration - Laboratory measurement of vibro-acoustic transfer properties of resilient elements - Part 1: Principles and guidelines»). Наименование настоящего стандарта изменено относительно наименования указанного международного стандарта для приведения в соответствие с ГОСТ Р 1.5 (пункт 3.5).
Наименование настоящего стандарта изменено относительно наименования указанного международного стандарта для приведения в соответствие с ГОСТ Р 1.5-2004 (подраздел 3.5).
При применении настоящего стандарта рекомендуется использовать вместо ссылочных международных стандартов соответствующие им национальные стандарты, сведения о которых приведены в дополнительном приложении ДА
5. ВЗАМЕН ГОСТ Р ИСО 10846-1-99
Информация об изменениях к настоящему стандарту публикуется в ежегодно издаваемом указателе «Национальные стандарты», а текст изменений и поправок - в ежемесячно издаваемых информационных указателях «Национальные стандарты». В случае пересмотра (замены) или отмены настоящего стандарта соответствующее уведомление будет опубликовано в ежемесячно издаваемом информационном указателе «Национальные стандарты». Соответствующая информация, уведомление и тексты размещаются также в информационной системе общего пользования - на официальном сайте Федерального агентства по техническому регулированию и метрологии в сети Интернет
СОДЕРЖАНИЕ
Пассивные виброизоляторы различных конструкций применяют для снижения уровня передаваемой вибрации. Примерами могут служить: опоры автомобильных двигателей; упругие опоры зданий; устройства крепления и упругие муфты в соединениях валов судовых машин; виброизоляторы, устанавливаемые в предметах бытовой техники.
Настоящий стандарт служит введением к серии стандартов на методы лабораторных измерений, проводимых для определения наиболее важной характеристики, описывающей передаточные свойства линейных виброизоляторов, - переходной (передаточной) динамической жесткости. В настоящем стандарте приведены теоретические основы методов, ограничения на условия их применения и руководство по выбору наиболее подходящего метода для каждого конкретного случая измерений.
Для всех методов подразумевается, где это необходимо, что лабораторные испытания проводят при предварительном нагружении объекта испытаний постоянной (статической) нагрузкой.
Результаты измерений могут быть использованы при решении проблем подавления низкочастотной вибрации и ослабления шума, порождаемого колебаниями элементов конструкции, посредством виброизоляторов. В то же время указанные методы не дают возможности полностью охарактеризовать работу виброизоляторов в условиях воздействий низкочастотной вибрации и ударов.
НАЦИОНАЛЬНЫЙ СТАНДАРТ РОССИЙСКОЙ ФЕДЕРАЦИИ
|
Вибрация ИЗМЕРЕНИЯ
ВИБРОАКУСТИЧЕСКИХ ПЕРЕДАТОЧНЫХ ХАРАКТЕРИСТИК УПРУГИХ ЭЛЕМЕНТОВ Часть 1 Общие принципы измерений Vibration. Laboratory measurement of vibro-acoustic
transfer properties of resilient elements. |
Дата введения - 2011-12-01
1. Область применения
Настоящий стандарт устанавливает общие принципы проведения измерений для определения передаточных характеристик упругих элементов (далее - виброизоляторы), а также руководство по выбору метода определения передаточных характеристик в лабораторных условиях в конкретном случае применения (см. [1] - [4]).
Настоящий стандарт распространяется на виброизоляторы, применяемые:
a) для снижения уровня передаваемой на конструкцию вибрации в звуковом диапазоне частот (от 20 Гц до 20 кГц), которая может производить шум, например в водной или воздушной среде;
b) для снижения низкочастотной вибрации (обычно в диапазоне от 1 до 80 Гц), которая может, например, оказывать неблагоприятное воздействие на людей или, при значительной мощности вибрации, вызывать повреждение конструкций.
Данные, полученные с помощью описанных в настоящем стандарте методов, могут быть использованы:
- для их указания изготовителями и поставщиками в документации на продукцию;
- при разработке продукции;
- в системах управления качеством продукции;
- при вибрационных расчетах конструкций.
Эти методы применимы при выполнении следующих условий:
a) линейности отклика виброизолятора (допускается, чтобы отклик виброизолятора на статическую нагрузку был нелинейным при условии, что после приложения этой нагрузки поведение виброизолятора линейно);
b) области контакта виброизолятора с источником вибрации и с изолируемой конструкцией можно рассматривать как точечные соединения.
2. Нормативные ссылки
В настоящем стандарте использованы нормативные ссылки на следующие стандарты:
ИСО 2041 Вибрация, удар и контроль технического состояния. Словарь (ISO 2041, Mechanical vibration, shock and condition monitoring - Vocabulary)
Руководство ИСО/МЭК 98-3 Неопределенность измерений. Часть 3. Руководство по выражению неопределенности измерений [ISO/IEC Guide 98-3, Uncertainty of measurement - Part 3: Guide to the expression of uncertainty in measurement (GUM 1995)]
3. Термины и определения
В настоящем стандарте применены термины по ИСО 2041, а также следующие термины с соответствующими определениями:
3.1 виброизолятор (vibration isolator, resilient element): Устройство, предназначенное для ослабления передаваемой вибрации в некотором диапазоне частот.
Примечание - Данное определение изменено по сравнению с ИСО 2041 (словарная статья 2.120).
3.2 упругая опора (resilient support): Виброизолятор, назначение которого - поддерживать часть машины, здания или конструкции другого типа.
3.3 испытуемый объект (test element): Виброизолятор, подвергающийся испытаниям, вместе с фланцами и, при необходимости, вспомогательными приспособлениями.
3.4 затормаживающая сила (blocking force) Fb: Сила, приложенная к выходной стороне испытуемого объекта и обеспечивающая ее неподвижность.
3.5 входная динамическая жесткость (входная жесткость) (dynamic driving point stiffness) k1,1: Частотно-зависимое отношение комплексной силы F1 в точке соединения виброизолятора с источником вибрации к комплексному перемещению u1 в этой же точке, когда к выходной стороне виброизолятора приложена затормаживающая сила, k1,1 = F1/u1.
Примечание 1 - Подстрочный индекс «1» означает, что силу и скорость измеряют на входной стороне виброизолятора.
Примечание 2 - Значение k1,1 может зависеть от предварительного статического нагружения, температуры, относительной влажности и других условий.
Примечание 3 - На низких частотах k1,1 определяется исключительно упругими и диссипативными силами, действующими в виброизоляторе. В области более высоких частот следует учитывать также силы инерции.
3.6 входная динамическая жесткость обращенного виброизолятора (dynamic driving point stiffness of inverted vibration isolator) k2,2: Входная динамическая жесткость виброизолятора, у которого входная и выходная стороны изменены на противоположные.
Примечание - На низких частотах, где входная динамическая жесткость определяется исключительно упругими и диссипативными силами, k1,1 = k2,2. В области более высоких частот, где влияют силы инерции, это равенство может нарушаться.
3.7 переходная динамическая жесткость1) (переходная жесткость) (dynamic transfer stiffness) k2,1: Частотно-зависимое отношение комплексной затормаживающей силы F2,b к комплексному перемещению u1 на входной стороне виброизолятора, k2,1 = F2,b/u1.
____________
1) В отечественной научно-технической литературе при описании частотных характеристик объектов вместо слова «переходная» часто используют слово «передаточная».
Примечание 1 - Подстрочные индексы «1» и «2» обозначают входную и выходную стороны виброизолятора соответственно.
Примечание 2 - Значение k2,1 - может зависеть от предварительного статического нагружения виброизолятора, его температуры и других условий.
Примечание 3 - На низких частотах k2,1 - зависит в основном от упругих и диссипативных сил в виброизоляторе и k1,1 ≈ k2,1. На высоких частотах, когда нельзя пренебречь влиянием сил инерции, k1,1 ≠ k2,1
3.8 коэффициент потерь виброизолятора (коэффициент потерь) (loss factor of resilient element) η: Отношение мнимой и действительной частей k2,1 (т.е. тангенс фазового угла k2,1) в диапазоне низких частот, на которых влияние инерционных сил в виброизоляторе незначительно.
3.9 точечное соединение (point contact): Область контакта, которая совершает колебания как поверхность абсолютно жесткого тела.
3.10 линейность (linearity): Свойство поведения виброизолятора в динамическом режиме, при котором выполняется принцип суперпозиции.
Примечание 1 - Принцип суперпозиции может быть сформулирован следующим образом: если в двух отдельных экспериментах входному воздействию x1(t) будет соответствовать отклик на выходе y1(t), а входному воздействию x2(t) - отклик y2(t), то считают, что принцип суперпозиции выполнен, если входному воздействию ax1(t) + bx2(t) будет соответствовать отклик ay1(t) + by2(t). Данное условие должно выполняться для любых a, b, х1(t) и x2(t), где a и b - произвольные константы.
Примечание 2 - Прямая проверка выполнения принципа суперпозиции малопригодна с практической точки зрения, поэтому контроль линейности обычно осуществляют, проводя измерения переходной жесткости в некотором диапазоне входных воздействий. Если при заданном предварительном статическом нагружении виброизолятора измеренное значение динамической жесткости не зависит от амплитуды входного возбуждения, то систему можно рассматривать как линейную. По сути, эта процедура является контролем пропорциональности между возбуждением и откликом.
3.11 прямой метод (direct method): Метод, в котором измерению подлежат перемещение, скорость или ускорение на входной стороне виброизолятора и сила на его выходной стороне (затормаживающая сила).
3.12 косвенный метод (indirect method): Метод, в котором измерению подлежит передаточная функция виброизолятора по перемещению, скорости или ускорению при нагружении его выходной стороны известной массой.
3.13 метод входной частотной характеристики (driving point method): Метод, при котором измерению подлежит одна из частотно-зависимых величин, описывающих движение (перемещение, скорость или ускорение), а также частотно-зависимая сила на входной стороне виброизолятора, когда его выходная сторона заторможена.
3.14 вибрация, передаваемая побочным путем (flanking transmission): Силы и ускорения на выходной стороне виброизолятора, вызванные вибрационным возбуждением на его входной стороне, но переданные не через виброизолятор, а другим путем.
3.15 верхняя граница диапазона частот применения метода (верхняя граница диапазона частот) fUL: Частота, зависящая от примененного метода определения частотной характеристики, в пределах до которой полученные значения k2,1 можно считать достоверными.
4. Выбор метода
Информация, необходимая для выбора метода определения частотной характеристики, который в наибольшей степени соответствует конкретному типу испытуемого виброизолятора, приведена в таблице 1.
Таблица 1 - Рекомендации по выбору метода
|
Метод определения частотной характеристики |
||||
|
Прямой метод по [1] |
Косвенный метод по [2] |
Прямой или косвенный метод по [3] |
Метод входной частотной характеристики по [4] |
|
|
Тип виброизолятора |
Опора |
Опора |
Не опора |
Опора |
|
Пример применения |
Упругие опоры для приборов, оборудования, машин и зданий |
Упругие опоры для приборов, оборудования, машин и зданий |
Сильфоны и рукава (без жидкости), упругие муфты, силовые кабели |
Упругие опоры для приборов, оборудования, машин и зданий |
|
Диапазон частот для данного метода |
От 1 Гц до fUL, fUL определяется свойствами испытательной установки. |
От f2 до f3. Обычно (но необязательно) 20 < f2 < 50 Гц; для очень жестких опор f2 > 100 Гц. |
Для прямого метода - см. графу 2. Для косвенного метода - см. графу 3 |
От 1 Гц до fUL. Обычно (но необязательно) fUL < 200 Гц и зависит от свойств, как испытательной установки, так и испытуемого объекта |
|
Обычно (но необязательно) 300 < fUL < 500 Гц |
||||
|
Число измеряемых компонентов поступательной вибрации |
1, 2 или 3 |
1, 2 или 3 |
1, 2 или 3 |
1, 2 или 3 |
|
Число измеряемых компонентов угловой вибрации |
- |
Согласно [2], (приложение А) |
Согласно [2], (приложение А) |
- |
|
Расширенная неопределенность при доверительной вероятности 95 % |
Определяют по Руководству ИСО/МЭК 98-3 |
Определяют по Руководству ИСО/МЭК 98-3, но не более 4 дБ |
Определяют по Руководству ИСО/МЭК 98-3, но не более 4 дБ |
Определяют по Руководству ИСО/МЭК 98-3 |
|
Примечание - Результаты для данного испытуемого объекта, которые могут быть получены с применением разных методов определения частотной характеристики, будут совпадать в пределах их неопределенности. |
||||
Более подробные рекомендации по выбору метода определения частотной характеристики приведены в разделах 5 и 6.
5. Теоретические основы измерений
5.1. Переходная динамическая жесткость
В данном разделе обоснован выбор переходной жесткости в качестве характеристики, которая в наибольшей степени подходит для описания передаточных свойств виброизоляторов в различных условиях их применения. Также указаны случаи, когда для описания передаточных свойств необходимо проводить измерения других характеристик, на которые настоящий стандарт не распространяется.
Переходная динамическая жесткость зависит от упругих, инерционных и демпфирующих свойств виброизолятора. Причиной преимущественного использования динамической жесткости в качестве характеристики передаточных свойств виброизоляторов является то, что данная величина хорошо согласуется с повсеместно используемыми значениями статической жесткости или динамической жесткости на низких частотах. На высоких частотах, когда необходимо учитывать силы инерции, действующие в виброизоляторе (т.е. волновые эффекты), поведение динамической жесткости становится более сложным. На низких частотах важны только силы упругости и демпфирования. Поскольку, как правило, модули упругости и характеристики демпфирования на низких частотах слабо зависят от частоты, то и динамическая жесткость на низких частотах практически постоянна.
Примечание - Для многих виброизоляторов их статическая жесткость и переходная динамическая жесткость на низких частотах могут не совпадать.
В общем случае переходная динамическая жесткость виброизолятора зависит от температуры, относительной влажности и начальной статической нагрузки. Описываемая теория измерений справедлива в предположении линейности отклика виброизолятора. Основания для такого предположения рассматриваются в приложении D.
Соотношения между переходной динамической жесткостью и другими частотными характеристиками приведены в приложении А. В реальных условиях испытаний выбор измеряемой характеристики движения (перемещения, скорости или ускорения) определяется практическими соображениями. Однако представление результатов в соответствии с требованиями, предусмотренными конкретным методом, может потребовать проведения соответствующих преобразований величин.
5.2. Матрица динамической жесткости виброизолятора
5.2.1. Общие положения
Обычный подход к анализу сложных колебательных систем состоит в представлении элементов системы в виде подсистем с известными передаточными матрицами (жесткости, податливости и т.д.). Элементами матрицы являются частотные характеристики заданного вида, которыми описываются линейные механические и акустические системы. На основе информации о свойствах отдельной подсистемы можно рассчитать соответствующие характеристики ансамбля подсистем. Матрицы различных частотных характеристик взаимосвязаны и могут быть легко преобразованы друг в друга [5]. Однако в методах, рассматриваемых в настоящем стандарте, для описания свойств виброизоляторов под статической нагрузкой использованы только матрицы жесткости.
Блок-схема системы «источник вибрации - виброизоляторы - изолируемая конструкция» показана на рисунке 1.

Рисунок 1
Система состоит из трех блоков, представляющих, соответственно, источник вибрации, n параллельно работающих виброизоляторов и изолируемую конструкцию. Предполагается, что соединения источника вибрации с виброизолятором и виброизолятора с изолируемой конструкцией можно рассматривать как точечные. Каждой точке соединения поставлены в соответствие обобщенный вектор силы, состоящий из сил и моментов, действующих вдоль трех взаимно перпендикулярных координатных осей, и обобщенный вектор перемещения, содержащий по три составляющих поступательной и угловой вибрации. На рисунке 1 показано только по одной составляющей для каждого из векторов F1, u1, F2 и u2. Каждый из таких векторов состоит из 6n элементов, где n - число виброизоляторов.
Чтобы показать, что переходная жесткость холостого хода1), определенная в 3.7 как переходная динамическая жесткость, удовлетворяет целям описания свойств виброизоляторов в большинстве практических случаев, далее рассматривается работа виброизолятора как для простейшего случая однонаправленной вибрации, так и для случая колебаний в нескольких направлениях.
___________
1) Переходная частотная характеристика называется характеристикой холостого хода в том случае, если она получена в условиях, когда все точки измерений, кроме той, что совпадает с точкой возбуждения, принуждены к неподвижности (заторможены). В данном случае достаточно, если заторможена точка соединения виброизолятора с изолируемой конструкцией.
5.2.2. Один виброизолятор и одно направление вибрации
Условие равновесия виброизолятора в случае однонаправленной вибрации может быть выражено формулами:
F1 = k1,1 · u1 + k1,2 · u2, (1)
F2 = k2,1 · u1 + k2,2 · u2, (2)
где k1,1 и k2,2 - входные жесткости, полученные для условия, когда противоположная возбуждению сторона виброизолятора заторможена (т.е. u2 = 0 и u1 = 0 соответственно);
k1,2 и k2,1 - переходные жесткости холостого хода, т.е. отношения силы в заторможенной точке к перемещению в точке возбуждения. Для линейных виброизоляторов пассивного типа, в отношении которых справедлив принцип взаимности, имеет место равенство k1,2 = k2,1.
На высоких частотах, когда существенно влияние сил инерции, значения k1,1 и k2,2 отличаются друг от друга. На низких частотах, когда во внимание можно принимать только упругие и диссипативные силы, все значения ki,j равны между собой.
Примечание 1 - Формулы (1) и (2) описывают соотношения между гармоническими составляющими произвольной частоты; Fi и ui комплексные функции времени, ki,j - комплексные величины.
В матричной форме формулы (1) и (2) имеют вид
![]() (3)
(3)
где матрица динамической жесткости К имеет вид
 (4)
(4)При возбуждении изолируемой конструкции через виброизолятор
![]() (5)
(5)
где kr - входная динамическая жесткость изолируемой конструкции.
Знак минус поставлен в соответствии с выбором положительного направления, как показано на рисунке 1.
Из формул (2) - (5) следует, что
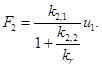 (6)
(6)Таким образом, при заданном возбуждении u1 сила F2 зависит от входных динамических жесткостей как виброизолятора, так и изолируемой конструкции. Однако если выполнено условие |k2,2| < 0,1|kr|, то F2 с точностью до 10 % совпадает с затормаживающей силой F2,b, т.е.
F2 ≈ F2,b = k2,1 · u1. (7)
Поскольку работа виброизоляторов эффективна только в случаях, когда они установлены между системами с относительно большой динамической жесткостью, формула (7) практически всегда справедлива, и на ней основаны методы определения динамической жесткости, рассматриваемые в настоящем стандарте. Измерять переходную жесткость холостого хода (или аналогичные ей характеристики) виброизолятора с начальной статической нагрузкой легче, чем измерять полную матрицу жесткости (или полную матрицу передаточной функции). Тем более, что этот параметр с достаточной полнотой характеризует свойства виброизолятора в предполагаемых условиях его применения.
Примечание 2 - В случаях, когда условие |k2,2| << |kr| не выполнено, для определения F2 по заданному перемещению и1, как следует из формулы (6), должны быть также известны значения r2,2 и kr
5.2.3. Один виброизолятор и шесть составляющих вибрации
Если силы и характеристики движения в каждой из точек соединения описывают через шесть ортогональных составляющих (три для поступательной и три для угловой вибрации), то виброизолятор можно представить в виде 12-полюсника [11]. Формула для матричной формы с 12 параметрами динамической жесткости эквивалентна формуле (3), где векторы шести перемещений, шести углов поворота, шести сил и шести моментов сил имеют вид
 (8)
(8)
Матрица динамической жесткости размером 12´12 может быть разбита на четыре блока размером 6´6 в виде
 (9)
(9)где К1,1 и К2,2 - матрицы (симметричные) входной жесткости;
К1,2 и К2,1 - матрицы переходной жесткости холостого хода.
Выполнение принципа взаимности предполагает, что переходные матрицы и соответствующие им транспонированные матрицы попарно равны.
Если предположить, что входная динамическая жесткость изолируемой конструкции велика по сравнению с входной динамической жесткостью виброизолятора, то сила F, воздействующая на эту конструкцию, будет приближенно равна затормаживающей силе Fb, т.е.
![]() (10)
(10)
Таким образом, переходная жесткость холостого хода описывает передаточные свойства виброизоляторов и в случае многокомпонентной вибрации.
5.3. Необходимая полнота описания матрицы переходной жесткости холостого хода
В общем случае матрица переходной жесткости холостого хода К2,1 одного виброизолятора состоит из 36 элементов. Однако при симметрии конструкции виброизолятора большинство элементов матрицы равны нулю. Для конструкций с центральной симметрией (круговой цилиндр или параллелепипед) число отличных от нуля элементов матрицы равно 10, а число различных значений, которое будут принимать ненулевые элементы, - 5 (см. приложение В, а также [11]).
На практике число элементов матрицы, необходимое для адекватного описания виброакустических передаточных свойств виброизолятора, даже меньше числа элементов, теоретически отличных от нуля. В случае поступательной вибрации, как правило, достаточно принимать в расчет только один, два или три диагональных элемента - соответственно для вибрации только в одном (обычно вертикальном), двух или трех взаимно перпендикулярных направлениях. Более подробная информация о числе учитываемых элементов матрицы жесткости дана в приложении С.
В некоторых специальных случаях большое значение имеют и степени свободы, связанные с угловыми колебаниями (см. приложение С). В 6.3.5 даны ссылки на соответствующие литературные источники, в которых указано, как получить параметры, связанные с угловой вибрацией, тем же способом, что и для поступательной вибрации.
5.4. Побочные пути распространения вибрации
Модель, представленная на рисунке 1, также как и формулы (1) - (10) справедливы только в случае, если имеется единственный путь передачи вибрации от источника к изолируемой конструкции через виброизоляторы. На практике же могут существовать и побочные пути распространения вибрации - по механическим конструкциям или через окружающую среду. Для каждого метода определения динамической жесткости влияние побочных путей на результаты измерений характеристик виброизолятора должно быть сведено к минимуму.
5.5. Коэффициент потерь
Цель настоящего стандарта - установить общие методы определения частотно-зависимой переходной динамической жесткости k2,1. Ряд пользователей, кроме того, может быть заинтересован в определении демпфирующих свойств виброизолятора. Настоящий стандарт не устанавливает метод измерений характеристик демпфирования. Тем не менее ниже дано теоретическое обоснование процедуры использования данных о фазовом угле комплексной функции переходной динамической жесткости k2,1 для получения информации о демпфирующих свойствах виброизолятора.
Для общего представления достаточно рассмотреть случай, описанный в 5.2.2. Поскольку в настоящем стандарте рассмотрены только измерения, проводимые при заторможенной точке соединения виброизолятора с изолируемой конструкцией, формулы (1) и (2) можно свести к виду:
F1 = k1,1 · u1, (11)
F2 = k2,1 · u1. (12)
На низких частотах, когда силами инерции можно пренебречь, соотношение между фазовым углом переходной динамической жесткости и характеристикой демпфирования виброизолятора имеет простой вид. В данной области частот частотно-зависимую жесткость можно аппроксимировать выражением
k ≈ k1,1 ≈ k2,1. (13)
Эту комплексную величину можно записать в виде
k = k0(1 + jη), (14)
где k0 - действительная часть k.
Частотно-зависимый коэффициент потерь η определяет демпфирование в виброизоляторе на низких частотах (см. 3.8).
Соотношение между коэффициентом потерь и фазовым углом j комплексной величины k определяется формулой
η = tgj. (15)
Таким образом, коэффициент потерь виброизолятора можно оценить по формуле
η ≈ tgj2,1, (16)
где j2,1 - фазовый угол переходной динамической жесткости k2,1.
При определении демпфирующих свойств виброизолятора необходимо учитывать следующие моменты.
а) Измерения с помощью формулы (16) коэффициента потерь в случаях, когда эта величина мала, крайне чувствительны к погрешностям измерения фазы [3]. Однако для виброизоляторов, изготовленных из резиноподобного материала, эта проблема не так остра, за исключением частот ниже нескольких герц.
b) На высоких частотах, когда формула (13) несправедлива, формулу (16) для определения демпфирующих свойств виброизолятора использовать нельзя. Хотя простых и четких критериев применимости формулы (16) не существует, все же в качестве достаточного признака можно считать, что резкое изменение кривой η с ростом частоты свидетельствует о том, что формулой (16) при большей частоте пользоваться нельзя.
6. Принципы проведения измерений
6.1. Переходная динамическая жесткость
Переходная динамическая жесткость является функцией частоты. Кроме того, ее значения зависят также от приложенной начальной нагрузки и, во многих случаях, от температуры. Для получения необходимых данных используют три метода определения динамической жесткости (см. раздел 4), поскольку достоинства каждого из методов могут компенсировать соответствующие недостатки других.
Прямой метод требует проведения измерений перемещения (скорости, ускорения) на входной стороне виброизолятора и силы на его выходной стороне.
Косвенный метод предусматривает измерение передаточной функции виброизолятора (по перемещению, скорости или ускорению). Для создания затормаживающей силы виброизолятор с выходной стороны нагружают массой тела, обладающего большой динамической жесткостью. Произведение измеренного перемещения в данной точке на известное значение динамической жесткости нагрузки может служить достаточно точной оценкой затормаживающей силы в заданном диапазоне частот.
Метод входной частотной характеристики для оценки переходной динамической жесткости используют в случае, если испытательная установка, обеспечивая неподвижность выходной стороны виброизолятора, позволяет проводить измерения только на его входной стороне. Результаты измерений перемещения (скорости, ускорения) и вынуждающей силы на входной стороне виброизолятора позволяют получить оценку входной динамической жесткости. Эта частотная характеристика совпадает с переходной динамической жесткостью только на низких частотах, поэтому применение метода входной частотной характеристики ограничено низкочастотным диапазоном. В этом состоит недостаток данного метода (по сравнению, например, с прямым методом), однако его часто применяют по практическим соображениям ввиду относительно низкой стоимости испытательной установки.
6.2. Прямой метод
6.2.1. Испытательная установка
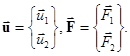
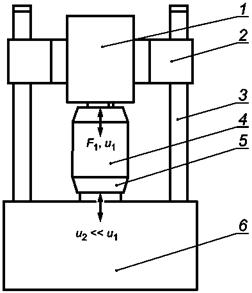
Основные принципы определения переходной динамической жесткости продемонстрированы на примере испытательной установки, изображенной на рисунке 2.
1 - исполнительное устройство
гидравлического типа (обеспечивает предварительное статическое нагружение и
динамическое возбуждение);
2 - подвижная траверса; 3 - направляющие стойки; 4 -
испытуемый объект; 5 - система измерения силы; 6 - жесткое основание
Рисунок 2 - Пример испытательной установки для прямого метода
Испытуемый объект помещают между вибровозбудителем с входной стороны и жестким основанием с выходной стороны виброизолятора. Между испытуемым объектом и жестким основанием устанавливают датчик силы. В этом месте для создания условий точечного соединения и однонаправленного движения часто помещают плиту, позволяющую равномерно распределить приложенное усилие по ее поверхности. Не следует допускать, чтобы опорой большого фланца виброизолятора служил датчик силы малых размеров, поскольку в этом случае вибрация фланца будет существенно иной, нежели в условиях применения виброизолятора, и оценка переходной динамической жесткости окажется недостоверной. Для крупных виброизоляторов с большой начальной статической нагрузкой для обеспечения необходимой точности метода может потребоваться проведение измерений с помощью нескольких датчиков силы с последующим усреднением.
Переходную динамическую жесткость определяют по формуле
![]() (17)
(17)
при соблюдении условия u2 << и1.
6.2.2. Измеряемые величины
Измеряемыми величинами являются сила и одна из характеристик движения: перемещение, скорость или ускорение.
6.2.3. Предварительное статическое нагружение
Переходная динамическая жесткость может существенно зависеть от приложенной к виброизолятору статической нагрузки, поэтому испытания проводят в условиях предварительного статического нагружения. Зачастую это требует использования специальной испытательной установки. Использование вибровозбудителя гидравлического типа позволяет одновременно создать требуемую статическую нагрузку и динамическое возбуждение. Это, однако, не исключает применения установок, где нагрузка создается с применением одного устройства, а возбуждение - другого.
6.2.4. Ограничения прямого метода по диапазону частот
Диапазон частот применения прямого метода зависит, в первую очередь, от свойств испытательной установки. Одно из ограничений связано с рабочим диапазоном частот вибровозбудителя. Другое ограничение зачастую связано с распространением высокочастотной вибрации по раме конструкции, используемой для создания предварительного статического нагружения. Ограничения по диапазону частот вызывают также собственные колебания рамной конструкции, частота которых определяется массой подвижной траверсы и жесткостью вертикальных направляющих стоек в продольном направлении. Обычно, как указано в таблице 1, верхняя граница диапазона частот fUL лежит в пределах 300 - 500 Гц. Такие значения приводят испытательные лаборатории, способные обеспечить начальную статическую нагрузку до 100 кН (см. [10]). На установках меньших размеров, используемых для испытаний небольших виброизоляторов, измерения могут быть проведены в диапазоне частот до нескольких килогерц.
Потенциально большими возможностями по увеличению верхней границы диапазона частот обладает косвенный метод (см. 6.3). Это обусловлено тем, что в косвенном методе меньше возможностей распространения вибрации по побочному пути, поскольку испытуемый объект динамически развязан с рамной конструкцией, создающей начальную статическую нагрузку.
6.2.5. Направления вибрации
На рисунке 2 изображена типовая испытательная установка для измерений динамической жесткости в направлении приложенной статической нагрузки. Однако, вообще говоря, при использовании прямого метода можно проводить измерения поступательной и угловой вибрации во всех направлениях. Метод определения динамической жесткости для трех ортогональных направлений поступательной вибрации установлен в [1].
6.3.1. Испытательная установка
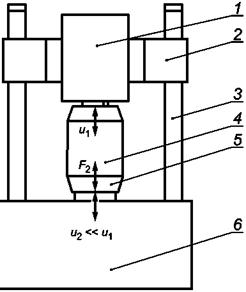
Основные принципы измерений переходной динамической жесткости продемонстрированы на примере испытательной установки, изображенной на рисунке 3.
Испытуемый объект помещают между двумя жесткими массами.
Масса на входной стороне испытуемого объекта, выполняет две функции:
- обеспечивает (в силу высокой жесткости) условия точечного соединения;
- позволяет создать однонаправленное возбуждение в разных направлениях (см. [1] - [3]).
Масса на выходной стороне испытуемого объекта также имеет два назначения:
- обеспечивает условия точечного соединения на выходной стороне виброизолятора;
- гасит (за счет своего большого значения и большого значения момента инерции) все возбужденные в испытуемом объекте частотные составляющие вибрации. Для этого шесть собственных частот массово-пружинной системы, состоящей из виброизолятора и массы т2, должны лежать много ниже диапазона частот измерений. В таком случае сила, действующая со стороны виброизолятора на массу, приближенно равна затормаживающей силе и может быть рассчитана по ускорению этой массы.
Отношение и2/и1, где u1 - перемещение массы m1, а u2 - перемещение массы т2, обычно называют коэффициентом передачи (по перемещению). Если в качестве измеряемого параметра движения взять скорость или ускорение, то значение коэффициента передачи останется неизменным.
1 - вибровозбудитель; 2
- подвижная траверса; 3 - вспомогательные виброизоляторы для
динамической развязки от устройства нагружения;
4 - масса распределения возбуждения; 5 - испытуемый объект; 6
- нагружающая масса; 7 - вспомогательные виброизоляторы; 8 -
жесткое основание
Рисунок 3 - Пример испытательной установки для косвенного метода
Формулу, связывающую переходную динамическую жесткость и коэффициент передачи, можно получить из закона Ньютона
где f0 - собственная частота массово-пружинной системы, образованной массой т2 и испытуемым виброизолятором [а также вспомогательными виброизоляторами, как показано на рисунке 3b)].
Формула (18) получена в том же предположении, что и формула (7), т.е. что сила F2 приближенно равна затормаживающей силе.
6.3.2. Измеряемые величины
Измеряемыми величинами являются характеристики движения: перемещение, скорость или ускорение.
6.3.3. Измерения в условиях предварительного статического нагружения
6.3.3.1. Приложение начальной нагрузки
Способ приложения начальной статической нагрузки в испытательной установке показан на примерах рисунка 3.
В примере, изображенном на рисунке 3а), для создания предварительного нагружения используют силу тяжести, действующую на массу на выходной стороне испытуемого объекта. В такой установке статическую нагрузку принимает на себя либо вибровозбудитель, либо какая-нибудь вспомогательная конструкция (например, дополнительные виброизоляторы). Подобные установки, однако, зачастую не обеспечивают стабильность результатов измерений, особенно в случае испытаний виброизоляторов больших размеров при высоких статических нагрузках.
В примере, изображенном на рисунке 3b), для приложения начальной статической нагрузки использованы рамная конструкция и исполнительное устройство, например гидравлического типа. Масса т2 на выходной стороне испытуемого объекта развязана с рамной конструкцией посредством вспомогательных виброизоляторов. Аналогичные виброизоляторы использованы, чтобы развязать рамную конструкцию и массу на входной стороне виброизолятора. Использование вспомогательных виброизоляторов делает косвенный метод более устойчивым к влиянию вибрации, передаваемой через рамную конструкцию, по сравнению с прямым методом. Более подробная информация приведена в [2].
Примечание - На практике общая жесткость вспомогательных виброизоляторов может быть того же порядка, что и жесткость испытуемого виброизолятора.
6.3.3.2. Другие виды приложения статической нагрузки
Виброизоляторы, не являющиеся опорами, также испытывают под номинальной статической нагрузкой. В случае гибкой муфты соединения валов, например, это означает, что к ней должен быть приложен постоянный момент сил.
6.3.4. Ограничения косвенного метода по диапазону частот
Желание расширить диапазон частот измерений приводит к взаимоисключающим требованиям к испытательной установке.
С одной стороны, чтобы расширить диапазон измерений в соответствии с формулой (18) в область низких частот, необходимо использовать большую массу т2, которая позволит получить достаточно низкое значение f0. Однако чем больше масса т2, тем меньшей жесткостью она будет обладать и, соответственно, тем ниже будет верхняя граница диапазона частот.
Часто условия применения виброизоляторов требуют знания их динамических свойств в области звуковых частот, где виброизолятор не может быть представлен в виде пружины с нулевой массой. В таких случаях компромиссное решение может быть получено следующим образом.
Приближенную оценку частоты fe первого собственного резонанса виброизолятора (в направлении максимальной жесткости) можно получить по формуле
 (19)
(19)
где k0 - динамическая жесткость виброизолятора на низких частотах;
теl - масса упругого элемента виброизолятора вместе с массой фланца на его входной стороне.
На низких частотах переходная динамическая жесткость приближенно равна k0. Многие виброизоляторы ведут себя как безмассовые пружины в диапазоне частот вплоть до f < fe/3. Выбор массы из условия f0 £ 0,1fe позволит получить надежные измерения для определения переходной динамической жесткости для частот f ³ fe/3. Если с точки зрения применения виброизолятора особую важность представляет диапазон f ³ fe/3, то без проведения измерений можно принять, что в области более низких частот значение динамической жесткости будет тем же, что и на частоте f = fe/3.
Чтобы получить достоверные результаты измерений в широком диапазоне частот, желательно иметь низкое значение для f0 и поддерживать необходимую жесткость массы т2 вплоть до верхней границы диапазона частот измерений. Легче всего удовлетворить поставленным требованиям, используя в качестве массы т2 стальной блок.
Если требуемый диапазон частот измерений слишком широк, чтобы его можно было обеспечить с помощью одного блока, то измерения в областях низких и высоких частот могут быть проведены с блоками разных размеров.
6.3.5. Направления вибрации
На рисунке 3 изображены типовые испытательные установки для измерений динамической жесткости в направлении приложенной статической нагрузки. Однако, вообще говоря, при использовании косвенного метода можно проводить измерения поступательной и угловой вибрации во всех направлениях. Метод определения динамической жесткости для трех ортогональных направлений поступательной вибрации установлен в [2].
Возможности измерений угловой вибрации на входной и выходной сторонах виброизолятора рассмотрены в [2], [3], [11], [13].
6.4. Метод входной частотной характеристики
6.4.1. Испытательная установка
Пример испытательной установки для измерения входной динамической жесткости показан на рисунке 4.
Установка похожа на изображенную на рисунке 2, однако вместо измерений затормаживающей силы проводят измерения силы, действующей на виброизолятор в точке возбуждения. Таким образом, использование данного метода для определения переходной динамической жесткости основано на предположении, что в области низких частот эта характеристика приближенно равна входной динамической жесткости вследствие пренебрежимой малости сил инерции в сравнении с силами упругости, т.е. справедлива формула
 (20)
(20)Способ приложения начальной статической нагрузки тот же, что и в прямом методе. Измерения могут быть выполнены для поступательной вибрации в трех взаимно перпендикулярных направлениях. Измеряемыми величинами являются сила и одна из характеристик движения: перемещение, скорость или ускорение.
1 - исполнительное
устройство гидравлического типа (обеспечивает предварительное статическое
нагружение и динамическое возбуждение);
2 - подвижная траверса; 3 - направляющие стойки; 4 -
система измерения силы; 5 - испытуемый объект;
6 - жесткое основание
Рисунок 4 - Пример испытательной установки для измерений входной динамической жесткости
6.4.2. Ограничения метода входной частотной характеристики по диапазону частот
Приближенная формула (20) справедлива только в области низких частот (обычно до 200 Гц), когда силы инерции малы по сравнению с силами упругости и демпфирования. Более точные количественные оценки приведены в [4].
6.4.3. Направления вибрации
На рисунке 4 изображена типовая испытательная установка для измерений динамической жесткости в направлении приложенной статической нагрузки. Однако метод входной частотной характеристики позволяет проводить измерения для поступательной и угловой вибрации во всех направлениях. Метод определения динамической жесткости для трех ортогональных направлений поступательной вибрации установлен в [4].
Приложение A
(справочное)
Соотношения между переходной динамической
жесткостью и другими частотными характеристиками
Для линейных виброизоляторов характеристиками, непосредственно связанными с динамической жесткостью, являются механический импеданс и эффективная масса. Обратными к ним величинами являются динамическая податливость, механическая подвижность и ускоряемость соответственно.
В таблице А.1 представлены наименования и соответствующие обозначения для динамической жесткости и связанных с ней величин.
Таблица A.1 - Обозначения динамической жесткости и связанных с ней величин
|
Обратная величина |
|||
|
Обозначение |
Наименование |
Обозначение |
Наименование |
|
k |
Динамическая жесткость |
1/k |
Динамическая податливость |
|
Z |
Механический импеданс |
1/Z |
Механическая подвижность |
|
meff |
Эффективная масса |
1/meff |
Ускоряемость |
В таблице А.2 показаны коэффициенты для преобразования одной величины в другую, например k = -ω2 · тeff = jω · Z и т.п. Умножение на коэффициент jω означает, что модуль частотной характеристики на частоте f нужно умножить на ω = 2pf, а к соответствующему значению фазового угла прибавить p/2 рад.
Таблица A.2 - Коэффициенты связи динамической жесткости с другими частотными характеристиками
|
Обозначение |
Определение1) |
k |
Z |
meff |
|
|
Переходная динамическая жесткость |
k |
F/u |
1 |
jω |
-ω2 |
|
Переходный механический импеданс |
Z |
F/v |
1/jω |
1 |
jω |
|
Эффективная масса |
meff |
F/a |
-1/ω2 |
1/jω |
1 |
|
1) F - сила; и - перемещение; v - скорость; а - ускорение. |
|||||
Приложение B
(справочное)
Влияние симметрии конструкции виброизолятора на вид
матрицы переходной жесткости
Формула (9) показывает разбиение матрицы динамической жесткости виброизолятора размером 12´12 на четыре блока размером 6´6 каждый. Настоящий стандарт посвящен измерению отдельных элементов матрицы динамической жесткости К2,1 размером 6´6. Эти элементы представляют собой отношения затормаживающих сил к перемещениям на входной стороне виброизолятора.
Данные элементы изображены на рисунке В.1 в прямоугольной системе координат с осями x, y и z.
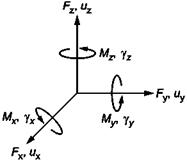
Рисунок В.1 - Обозначение сил и перемещений в декартовой системе координат
Вектор шести поступательных и шести угловых перемещений может быть записан в виде u1 = {u1х, u1у, u1z, g1х, g1у, g1z}.
Вектор шести затормаживающих сил и моментов сил может быть записан в виде F2, blocking = {F2х, F2у, F2z, M2х, M2у, M2z}.
Тогда формулу (10) можно представить следующим образом
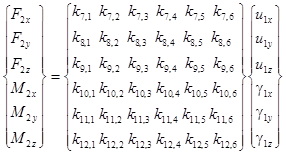
Вследствие симметрии конструкции виброизолятора большая часть элементов матрицы равна нулю, а некоторые ненулевые элементы матрицы могут быть равны между собой. Это показано на следующих четырех примерах для типичных форм конструкции виброизоляторов (направление координатных осей в соответствии с рисунком В.1).
Пример 1 - Две ортогональные плоскости симметрии (10 различных ненулевых элементов)
|
u1x |
u1y |
u1z |
g1x |
g1y |
g1z |
|
|
F2x |
k7,1 |
0 |
0 |
0 |
k7,5 |
0 |
|
F2y |
0 |
k8,2 |
0 |
k8,4 |
0 |
0 |
|
F2z |
0 |
0 |
k9,3 |
0 |
0 |
0 |
|
M2x |
0 |
k10,2 |
0 |
k10,4 |
0 |
0 |
|
М2у |
k11,1 |
0 |
0 |
0 |
k11,5 |
0 |
|
M2z |
0 |
0 |
0 |
0 |
0 |
k12,6 |

Пример 2 - Три ортогональные плоскости симметрии (10 ненулевых элементов; 8 различных значений)
|
u1x |
u1y |
u1z |
g1x |
g1y |
g1z |
|
|
F2x |
k7,1 |
0 |
0 |
0 |
k7,5 |
0 |
|
F2y |
0 |
k8,2 |
0 |
k8,4 |
0 |
0 |
|
F2z |
0 |
0 |
k9,3 |
0 |
0 |
0 |
|
M2x |
0 |
= -k8,4 |
0 |
k10,4 |
0 |
0 |
|
М2у |
= -k7,5 |
0 |
0 |
0 |
k11,5 |
0 |
|
M2z |
0 |
0 |
0 |
0 |
0 |
k12,6 |
Пример 3 - Осевая симметрия относительно линии пересечения плоскостей симметрии примера 1 (10 ненулевых элементов; 6 различных значений)
|
u1x |
u1y |
u1z |
g1x |
g1y |
g1z |
|
|
F2x |
k7,1 |
0 |
0 |
0 |
k7,5 |
0 |
|
F2y |
0 |
= k7,1 |
0 |
= k7,5 |
0 |
0 |
|
F2z |
0 |
0 |
k9,3 |
0 |
0 |
0 |
|
M2x |
0 |
k10,2 |
0 |
k10,4 |
0 |
0 |
|
М2у |
= k10,2 |
0 |
0 |
0 |
= k10,4 |
0 |
|
M2z |
0 |
0 |
0 |
0 |
0 |
k12,6 |

Пример 4 - Параллелепипед или круговой цилиндр (10 ненулевых элементов; 5 различных значений)
|
u1x |
u1y |
u1z |
g1x |
g1y |
g1z |
|
|
F2x |
k7,1 |
0 |
0 |
0 |
k7,5 |
0 |
|
F2y |
0 |
= k7,1 |
0 |
= k7,5 |
0 |
0 |
|
F2z |
0 |
0 |
k9,3 |
0 |
0 |
0 |
|
M2x |
0 |
= -k7,5 |
0 |
k10,4 |
0 |
0 |
|
М2у |
= -k7,5 |
0 |
0 |
0 |
= k10,4 |
0 |
|
M2z |
0 |
0 |
0 |
0 |
0 |
k12,6 |
Приложение C
(справочное)
Матрица переходной жесткости упрощенного вида
C.1. Общие положения
Как указано в 5.3, во многих практических случаях для адекватного представления матрицы переходной жесткости достаточно определить только один, два или три элемента этой матрицы, связанных с поступательной вибрацией. Ниже рассмотрено несколько примеров, разъясняющих данное положение.
C.2. Поступательная вибрация
Из блок-схемы системы «источник вибрации - виброизолятор - изолируемая конструкция» (рисунок 1) следует, что вибрация, передаваемая на конструкцию через виброизолятор, зависит от исходной вибрации источника, переходной жесткости виброизолятора и входной жесткости изолируемой конструкции. Обычно передаваемая от источника вибрация не бывает однонаправленной, поэтому важно измерять жесткость виброизолятора в двух или трех ортогональных направлениях.
В случае если уровни вибрации, передаваемой от источника, имеют один порядок по всем трем ортогональным направлениям, для описания передаточных свойств виброизолятора необходимо знать, по крайней мере, три значения переходной жесткости, а именно диагональные элементы матрицы переходной жесткости, соответствующие поступательному движению. Конечно, если конструкция виброизолятора симметрична, то может быть достаточно знать только два значения переходной жесткости - одно для вертикального и одно для поперечного направления.
Допустимо ли пренебрежение вибрацией в поперечном направлении, зависит от двух факторов:
- отношения входных жесткостей в поперечном и вертикальном направлениях для виброизолятора;
- отношения входных жесткостей в поперечном и вертикальном направлениях для изолируемой конструкции.
Например, оборудование часто устанавливают на массивном бетонном фундаменте на виброизоляторах, жесткость которых в поперечном направлении равна или меньше их жесткости в вертикальном направлении. В то же время жесткость фундамента в вертикальном направлении меньше, чем в поперечном. В данном случае вполне оправданно рассматривать передачу вибрации только в вертикальном направлении и, таким образом, только в этом направлении измерять жесткость виброизолятора.
Рассмотрим другой пример, когда виброизоляторы являются составной частью конструкции, подверженной тепловому расширению (допустим, системы выхлопа). Виброизоляторы конического типа могут иметь жесткость в поперечном направлении в десять раз выше, чем в направлении основной нагрузки. Сама же изолируемая конструкция является весьма гибкой во всех направлениях. Поэтому анализ поперечной вибрации, во всяком случае, не менее важен, чем в направлении действия статической нагрузки.
Следовательно, решение о том, какое число элементов матрицы переходной жесткости следует измерять для каждого конкретного виброизолятора, должно быть принято исходя из типа виброизолятора и условий его применения.
C.3. Угловая вибрация
Элементы матриц жесткостей, соответствующие составляющим угловой вибрации, а также элементы, связывающие составляющие поступательной вибрации на одной стороне виброизолятора с составляющими угловой вибрации на другой стороне, в настоящем стандарте не рассматриваются. Одной из причин этого является сложность необходимых для таких целей измерений, особенно при отсутствии стандартизованных датчиков. При этом важно знать, к каким последствиям может привести неадекватное описание передаточных свойств виброизолятора.
Что касается источника вибрации и изолируемой конструкции, то в первом приближении можно считать, что соотношение между составляющими поступательной и угловой вибрации определяется длиной изгибных волн. С уменьшением длины волны влияние угловых колебаний или чувствительности к моментному возбуждению соответственно возрастает. Это означает, что для конструкций в виде балок и пластин малой толщины при относительно высоких частотах возбуждения угловые колебания будут проявляться сильнее. Если же вернуться к рассмотренному выше примеру машины, установленной на массивном бетонном фундаменте, то в данном случае влиянием угловых составляющих можно пренебречь.
Примером, когда влияние моментного возбуждения велико, могут служить тавровые или двутавровые балки. Входная динамическая жесткость таких балок в направлении действия силы F может быть очень большой, много большей значения этой характеристики для момента сил M (см. рисунок С.1).

Рисунок C.1 - Возбуждение в точке на вершине двутавровой балки силой F и моментом M
Виброизоляторы с геометрическими формами, обеспечивающими большую жесткость в поперечном направлении, проявляют, как правило, и большую жесткость для угловых колебаний. Если виброизолятор такой формы соединен с тонкостенной конструкцией в целях изоляции ее от высокочастотных колебаний, то влияние угловых составляющих матрицы переходной жесткости может быть очень значительным. В таких случаях рассмотренное выше упрощение, когда в расчет принимают только один, два или три элемента, соответствующие поступательной вибрации, может привести к значительным ошибкам при анализе передаваемой вибрации.
Приложение D
(справочное)
Линейность
В общем случае динамические свойства виброизоляторов зависят от постоянной нагрузки, амплитуды вибрации, частоты и температуры.
Предположение о линейности означает, что выполнен принцип суперпозиции и динамическая жесткость на заданной частоте не зависит от амплитуды вибрации. Для многих виброизоляторов, имеющих начальное статическое нагружение, такое предположение можно считать выполненным в некотором приближении при условии, что амплитуды динамической деформации малы по сравнению с деформацией под действием постоянной нагрузки. Однако необходимо отметить, что многое зависит от материала, из которого изготовлен виброизолятор, поэтому всегда следует выполнять простую процедуру контроля линейности, сравнивая значения динамической жесткости, полученные для разных амплитуд возбуждения в пределах заданного диапазона. Если значение частотной характеристики с изменением уровня вибрации остается постоянным, то можно считать условие линейности выполненным.
В работе [14] представлены данные зависимости действительной составляющей и фазового угла комплексного модуля сдвига бутилкаучука от амплитуды относительного сдвига и процентного содержания в нем углерода. Из нее следует, что для амплитуд менее 10-3 действительная составляющая и фазовый угол слабо зависят от амплитуды относительного сдвига. Если же значение амплитуды относительного сдвига превышает 2´10-3, то наблюдается существенное уменьшение динамической жесткости, особенно когда процентное содержание углерода велико.
Таким образом, важно принимать во внимание уровень амплитуд деформации, имеющих место на практике, и в зависимости от этого решать, можно ли признать условия испытаний резиновых виброизоляторов соответствующими требованиям настоящего стандарта или нет. Для амплитуд относительного сдвига менее 10-3 предположение о линейности (а значит, в частности, и о независимости от амплитуды, и выполнении принципа взаимности) представляется вполне обоснованным.
Виброизоляторы гидравлического типа, которые все чаще используют, например, в автомобильной промышленности, также могут проявлять нелинейные свойства, так как их жесткость сильно зависит от амплитуды вибрации. Ввиду двойственного назначения таких виброизоляторов: демпфирование низкочастотной вибрации, передаваемой на двигатель от неровностей дороги, и ослабление высокочастотной вибрации, передающейся от двигателя по механической конструкции и излучающейся в виде шума в окружающуюся среду, - испытания с переменной амплитудой возбуждения должны быть проведены во всем диапазоне частот работы виброизолятора [15], [16].
Иногда бывает заранее известно, что условие линейности не выполняется. Но и в таких случаях может оказаться целесообразным использование многих процедур, описанных в настоящем стандарте. При этом необходимо сформулировать специальные требования к испытаниям в отношении предварительного нагружения, амплитуды возбуждения и измеряемых величин.
Приложение ДА
(справочное)
Сведения о соответствии ссылочных международных
стандартов
ссылочным национальным стандартам Российской Федерации
Таблица ДА.1
|
Обозначение ссылочного международного стандарта |
Степень соответствия |
Обозначение и наименование соответствующего национального стандарта |
|
ИСО 2041:2009 |
- |
* |
|
Руководство ИСО/МЭК 98-3:2008 |
- |
* |
|
* Соответствующий национальный стандарт отсутствует. До его утверждения рекомендуется использовать перевод на русский язык данного международного стандарта. Перевод данного международного стандарта находится в Федеральном информационном фонде технических регламентов и стандартов. |
||
Библиография
|
Ключевые слова: вибрация, виброизолятор, источник вибрации, приемник вибрации, динамическая жесткость, входная жесткость, переходная жесткость, измерения, методы |