 | Информационная система | |
|
ФЕДЕРАЛЬНОЕ АГЕНТСТВО |
||
|
|
НАЦИОНАЛЬНЫЙ |
ГОСТ Р ЕН |

Безопасность машин
ФИЗИЧЕСКИЕ ВОЗМОЖНОСТИ ЧЕЛОВЕКА
Часть 1
Термины и определения
EN 1005-1:2001
Safety of
machinery - Human physical performance -
Part 1: Terms and definitions
(IDT)
|
|
Москва Стандартинформ 2008 |
Предисловие
Цели и принципы стандартизации в Российской Федерации установлены Федеральным законом от 27 декабря 2002 г. № 184-ФЗ «О техническом регулировании», а правила применения национальных стандартов Российской Федерации - ГОСТ Р 1.0-2004 «Стандартизация в Российской Федерации. Основные положения»
Сведения о стандарте
1. ПОДГОТОВЛЕН «Всероссийским научно-исследовательским институтом стандартизации и сертификации в машиностроении» (ФГУП «ВНИИНМАШ») и Экспериментальным научно-исследовательским институтом металлорежущих станков (ОАО «ЭНИМС») на основе собственного аутентичного перевода стандарта, указанного в пункте 4
2. ВНЕСЕН Техническим комитетом по стандартизации ТК 70 «Станки»
3. УТВЕРЖДЕН И ВВЕДЕН В ДЕЙСТВИЕ Приказом Федерального агентства по техническому регулированию и метрологии от 28 февраля 2008 г. № 22-ст
4. Настоящий стандарт идентичен европейскому стандарту ЕН 1005-1:2001 «Безопасность машин. Физические возможности человека. Часть 1. Термины и определения» (EN 1005-1:2001 «Safety of machinery - Human physical performance - Part 1: Terms and definitions»).
При применении настоящего стандарта рекомендуется использовать вместо европейских стандартов соответствующие национальные стандарты Российской Федерации, приведенные в приложении А
5. ВВЕДЕН ВПЕРВЫЕ
СОДЕРЖАНИЕ
Введение
Рабочие системы, выполненные в соответствии с требованиями эргономики, повышают безопасность, производительность и эффективность труда, улучшают условия работы и жизни человека, противодействуют отрицательному воздействию на здоровье и трудоспособность человека.
Конструкция машины, отвечающая требованиям эргономики, оказывает благоприятное влияние на рабочую систему и на надежность функционирования человека внутри этой системы.
Настоящий стандарт - один из многих эргономических стандартов по безопасности машин, устанавливающих принципы, которых должны придерживаться конструкторы и изготовители, чтобы выполнять требования эргономики.
Серия стандартов ЕН 1005 состоит из пяти стандартов, в которых рассматривается зависимость работоспособности человека от конструкции машины. В разделе «Область применения» каждого из этих документов определены границы его применения.
Рисунок 1 иллюстрирует отражение в стандартах различных аспектов физических возможностей человека.
ЕН 1005-2, ЕН 1005-3, ЕН 1005-4 посвящены общей оценке риска. Процедуры оценки риска в каждом стандарте имеют свои особенности.
Исследования физической нагрузки человека при ручном управлении или обслуживании машины базируются на методах и технических приемах, которые были разработаны различными научными дисциплинами (например, эпидемиологией, биомеханикой, физиологией, психофизикой). Целью настоящего стандарта является определение соответствующих понятий, способствующих дальнейшему расширению применения данных научных дисциплин в вопросах безопасности машин и совершенствованию применения стандартов при конструировании машин.

Рисунок 1 - Отражение в стандартах физических возможностей человека
Согласно ЕН 1070 [10] настоящий стандарт относится к типу В. Положения этого стандарта могут быть дополнены и изменены при разработке стандартов типа С.
Примечание - Для машин, которые подпадают под область применения стандарта типа C, положения стандартов типа C предпочтительнее соответствующих положений стандартов типа В.
ГОСТ Р ЕН 1005-1-2008
НАЦИОНАЛЬНЫЙ СТАНДАРТ РОССИЙСКОЙ ФЕДЕРАЦИИ
|
Безопасность машин ФИЗИЧЕСКИЕ ВОЗМОЖНОСТИ ЧЕЛОВЕКА Часть 1 Термины и определения Safety of machinery. Human physical performance. Part 1. Terms and definitions |
Дата введения - 2009-01-01
1. Область применения
Настоящий стандарт устанавливает термины и определения, применяемые в ЕН 1005-2, ЕН 1005-3, ЕН 1005-4 и ЕН 1005-5.
Основные понятия и общие эргономические принципы конструирования машин даны в ЕН 292-1, ЕН 292-2 [1], ЕН 614-1 [6].
Настоящий стандарт применяется к машинам, изготовленным после даты его введения.
2. Нормативные ссылки
В настоящем стандарте использованы датированные и недатированные ссылки на европейские стандарты. При датированных ссылках последующие редакции международных стандартов или изменения к ним действительны для настоящего стандарта только после введения изменений к настоящему стандарту или путем подготовки новой редакции настоящего стандарта. При недатированных ссылках действительно последнее издание приведенного стандарта (включая изменения).
ЕН 292-1:1991 Безопасность машин. Основные положения, общие принципы конструирования. Часть 1. Основные термины, методология
ЕН 1005-2 Безопасность машин. Физические возможности человека. Часть 2. Составляющая ручного труда при работе с машинами и механизмами
ЕН 1005-3:2001 Безопасность машин. Физические возможности человека. Часть 3. Рекомендуемые пределы усилий для работы на машинах
ЕН 1005-4 Безопасность машин. Физические возможности человека. Часть 4. Положение тела при работе с машинами и механизмами
ЕН 1005-5 Безопасность машин. Физические возможности человека. Часть 5. Оценка риска для кратковременных действий при высокой частоте манипуляций
3. Термины и определения
В настоящем стандарте применены термины по ЕН 1070 [10], а также следующие термины с соответствующими определениями:
|
3.1 абдукция: Движение частей человеческого тела в направлении от сагиттальной (срединной) плоскости (см. рисунки 2 и 3). |
en |
abduction |
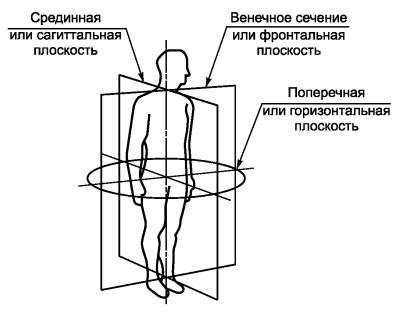
Рисунок 2 - Плоскости

Рисунок 3 - Абдукция и аддукция

Рисунок 4 - Угол асимметрии

Рисунок 5 - Способы захвата
|
en |
manual handling |
|
|
en |
manual lifting |
|
|
en |
manual carrying |
|
|
3.8.3 позиция по горизонтали Н: Расстояние по горизонтали между центром тяжести груза (средней точкой между руками) и средней точкой между лодыжками обеих ног, измеренное в начале и в конце подъема (см. рисунок 6) (на рисунке 6 представлен частный случай, когда Н в начале и конце подъема одинаково). |
en |
horizontal location |

Рисунок 6 - Горизонтальная и вертикальная позиции
|
3.8.4 позиция по вертикали V: Расстояние по вертикали между центром тяжести груза (средней точкой между руками) до пола, измеренное в начале подъема (см. рисунок 6). |
en |
vertical location |
|
3.8.5 дистанция подъема D: Абсолютное значение разности между положением центра тяжести груза в начале и в конце подъема по вертикали (см. рисунок 6). |
en |
vertical displacement |
|
en |
reference mass |
|
|
3.8.7 фактическая масса, кг: Масса объекта(ов), которым(ми) манипулируют вручную. |
en |
actual mass |
|
en |
operator |
|
|
en |
posture |
|
|
en |
recovery time |
|
|
en |
rest |
|
|
3.13 общая оценка риска: Наиболее полное определение вероятности и степени тяжести возможного повреждения или нанесения вреда здоровью в опасной ситуации с целью выбора подходящих мер безопасности (ЕН 292-1, пункт 3.8, и ЕН 1050 [8]). |
en |
risk assessment |
|
3.14 сагиттальная плоскость: Срединная плоскость тела, разделяющая тело продольно на правую и левую половины (см. рисунок 2). |
en |
sagittal |
|
en |
shift |
|
|
en |
static posture |
|
|
en |
technical aids |
Алфавитный указатель терминов на русском языке
абдукция 3.1
аддукция 3.4
время восстановления 3.11
действия 3.2
дистанция подъема 3.8.5
захват крюком 3.7.2
захват предмета 3.7
захват силовой 3.7.3
захват щипком 3.7.1
контингент рабочий 3.6
манипулирование вручную 3.8
масса расчетная 3.8.6
масса фактическая 3.8.7
обхват 3.7.3
оператор 3.9
оценка риска общая 3.13
переноска вручную 3.8.2
период действия 3.3
плоскость сагиттальная 3.14
подъем и опускание вручную 3.8.1
поза 3.10
позиция по вертикали 3.8.4
позиция по горизонтали 3.8.3
покой 3.12
положение тела статическое 3.16
смена 3.15
средства вспомогательные технические 3.17
угол асимметрии 3.5
Алфавитный указатель эквивалентов терминов на английском языке
abduction 3.1
adduction 3.4
action 3.2
action period 3.3
actual mass 3.8.7
angle of asymmetry 3.5
general working population 3.6
grip of object 3.7
hook grip 3.7.2
horizontal location 3.8.3
manual carrying 3.8.2
manual handling 3.8
manual lifting 3.8.1
operator 3.9
pinch grip 3.7.1
posture 3.10
power grip 3.7.3
recovery time 3.11
reference mass 3.8.6
rest 3.12
risk assessment 3.13
sagittal 3.14
shift 3.15
static posture 3.16
technical aids 3.17
vertical displacement 3.8.5
vertical location 3.8.4
Приложение А
(обязательное)
Сведения о соответствии национальных стандартов Российской Федерации ссылочным европейским стандартам
Таблица А.1
|
Обозначение ссылочного международного стандарта |
Обозначение и наименование соответствующего национального стандарта |
|
ЕН 292-1:1991 |
ГОСТ Р ИСО 12100-1-2007 Безопасность машин. Основные понятия, общие принципы конструирования. Часть 1. Основные термины, методология |
|
ЕН 1005-2 |
ГОСТ ЕН 1005-2-2005 Безопасность машин. Физические возможности человека. Часть 2. Составляющая ручного труда при работе с машинами и механизмами |
|
ЕН 1005-3 |
* |
|
ЕН 1005-4 |
* |
|
ЕН 1005-5 |
* |
|
* Соответствующий национальный стандарт отсутствует. До его утверждения рекомендуется использовать перевод на русский язык данного европейского стандарта, который находится в Федеральном информационном фонде технических регламентов и стандартов. |
|
Библиография
|
ЕН 292-2 |
Безопасность машин. Основные положения, общие принципы конструирования. Часть 2. Технические принципы и технические условия |
|
|
[2] |
ЕН 414 |
Безопасность машин. Правила разработки и оформления стандартов по безопасности |
|
[3] |
ЕН 547-1 |
Безопасность машин. Антропометрические данные. Часть 1. Принципы определения размеров проемов, обеспечивающих доступ человека к машине |
|
[4] |
ЕН 547-2 |
Безопасность машин. Антропометрические данные. Часть 2. Принципы определения размеров проемов для отдельных частей тела человека |
|
[5] |
ЕН 547-3 |
Безопасность машин. Антропометрические данные. Часть 3. Размеры тела человека |
|
ЕН 614-1 |
Безопасность машин. Эргономические принципы конструирования. Часть 1. Термины и общие положения |
|
|
[7] |
ЕН 894-3 |
Безопасность машин. Эргономические требования по конструированию средств отображения информации и органов управления. Часть 3. Исполнительные механизмы системы управления |
|
ЕН 1050 |
Безопасность машин. Принципы оценки и определения риска |
|
|
[9] |
ЕН ИСО 7250 |
Основные антропометрические данные для технического проектирования |
|
ЕН 1070 |
Безопасность машин. Терминология |
|
|
[11] |
ЕН/ТО 26385 |
Эргономические принципы в конструировании рабочих систем (ИСО 6385: 1981) |
|
[12] |
90/269/EWG |
Директивы Совета от 29 мая 1991 г. о регламентах, относящихся к безопасности и защите здоровья при манипуляциях грузами, которые представляют особую опасность для позвоночника работающего (четвертая директива статьи 16, абзац 1 Директив Совета 89/391/EWG) |
|
[13] |
89/391/EWG |
Директивы Совета от 12 июня 1989 г. о проведении мер по улучшению безопасности и защите здоровья работника во время работы |
|
[14] |
89/656/EWG |
Директивы Совета от 30 ноября 1989 г. о регламентах, относящихся к безопасности и защите здоровья путем использования персонального защитного снаряжения для работника при выполнении работы (третья директива статьи 16, абзац 1 Директив Совета 89/391/EWG) |
|
[15] |
89/686/EWG |
Директивы Совета от 21 декабря 1989 г. об уравнивании законодательных положений стран-членов по персональному защитному снаряжению (изменено Директивой Совета 93/95/EW). |
|
[16] |
|
Научная документация, обосновывающая пересмотр в 1991 г. уровня в сторону повышения: технические аннотации. Национальный институт по профессиональной безопасности и здоровью, Цинциннати, Огайо; май 1991; США, Департамент торговли, Национальная служба технической информации, Спрингфилд, VA22161 |
|
[17] |
|
Прикладное руководство по пересмотру уровня в сторону повышения. США, Департамент здоровья и обслуживания человека. Служба здоровья населения, Центр борьбы с болезнями и профилактики. Национальный институт по профессиональной безопасности и здоровью, Цинциннати, Огайо 45226, январь 1994 г. |
|
Ключевые слова: безопасность машин, эргономика, физические возможности человека, абдукция, аддукция, действие, рабочий контингент, манипуляции, оценка риска |