 | Информационная система | |
МЕЖГОСУДАРСТВЕННЫЙ
СОВЕТ ПО СТАНДАРТИЗАЦИИ, МЕТРОЛОГИИ
И СЕРТИФИКАЦИИ
(МГС)
INTERSTATE COUNCIL FOR STANDARDIZATION, METROLOGY AND
CERTIFICATION
(ISC)
|
МЕЖГОСУДАРСТВЕННЫЙ |
ГОСТ (ИСО 8662-7:1997) |
Ручные машины
ИЗМЕРЕНИЯ ВИБРАЦИИ НА РУКОЯТКЕ
Часть 7
Гайковерты, шуруповерты
и винтоверты ударные,
импульсные и трещОточные
ISO 8662-7:1997
Hand-held portable power tools - Measurement of vibrations
at the handle - Part 7: Wrenches, screwdrivers and nut runners
with impact, impulse or ratchet action
(MOD)
|
|
Москва |
(Поправка).
Предисловие
Цели, основные принципы и основной порядок проведения работ по межгосударственной стандартизации установлены ГОСТ 1.0-92 «Межгосударственная система стандартизации. Основные положения» и ГОСТ 1.2-97 «Межгосударственная система стандартизации. Стандарты межгосударственные, правила и рекомендации по межгосударственной стандартизации. Порядок разработки, принятия, применения, обновления и отмены»
Сведения о стандарте
1 ПОДГОТОВЛЕН Открытым акционерным обществом «Научно-исследовательский центр контроля и диагностики технических систем» на основе собственного аутентичного перевода стандарта, указанного в пункте 4
2 ВНЕСЕН Межгосударственным техническим комитетом по стандартизации МТК 183 «Вибрация и удар»
3 ПРИНЯТ Межгосударственным советом по стандартизации, метрологии и сертификации (протокол № 29 от 24 июня 2004 г.)
|
Краткое
наименование страны |
Код страны |
Сокращенное
наименование национального органа |
|
Азербайджан |
AZ |
Азстандарт |
|
Армения |
AM |
Армстандарт |
|
Беларусь |
BY |
Госстандарт Республики Беларусь |
|
Грузия |
GE |
Грузстандарт |
|
Казахстан |
KZ |
Госстандарт Республики Казахстан |
|
Кыргызстан |
KG |
Кыргызстандарт |
|
Молдова |
MD |
Молдова-Стандарт |
|
Российская Федерация |
RU |
Федеральное агентство по техническому регулированию и метрологии |
|
Таджикистан |
TJ |
Таджикстандарт |
|
Туркменистан |
TM |
Главгосслужба «Туркменстандартлары» |
|
Узбекистан |
UZ |
Узстандарт |
|
Украина |
UA |
Госпотребстандарт Украины |
4 Настоящий стандарт является модифицированным по отношению к международному стандарту ИСО 8662-7:1997 «Ручные машины. Измерения вибрации на рукоятке. Часть 7. Гайковерты, шуруповерты и винтоверты ударные, импульсные и трещоточные» (ISO 8662-7:1997 «Hand-held portable power tools - Measurement of vibrations at the handle - Part 7: Wrenches, screwdrivers and nut runners with impact, impulse or ratchet action») путем внесения технических отклонений, объяснение которых приведено во введении к настоящему стандарту, и изменения его структуры.
Сравнение структуры настоящего стандарта со структурой указанного международного стандарта приведено в дополнительном приложении С
(Поправка).
5 ВВЕДЕН ВПЕРВЫЕ
6 Приказом Федерального агентства по техническому регулированию и метрологии от 12 декабря 2007 г. № 360-ст межгосударственный стандарт ГОСТ 30873.7-2006 (ИСО 8662-7.1997) введен в действие в качестве национального стандарта Российской Федерации с 01 июля 2008 г.
Информация о введении в действие (прекращении действия) настоящего стандарта публикуется в указателе «Национальные стандарты».
Информация об изменениях к настоящему стандарту публикуется в указателе «Национальные стандарты», а текст изменений - в информационных указателях «Национальные стандарты». В случае пересмотра или отмены настоящего стандарта соответствующая информация будет опубликована в информационном указателе «Национальные стандарты»
СОДЕРЖАНИЕ
Введение
Настоящий стандарт является испытательным кодом по вибрации и устанавливает правила проведения испытаний для измерения вибрации на рукоятках гайковертов, шуруповертов и винтовертов с храповым механизмом, а также ударного и импульсного действия. Общие требования к испытаниям ручных машин установлены ГОСТ 16519.
Ручные машины данного вида используют для закручивания (завертывания) и откручивания (отвертывания) резьбонарезных деталей - гаек и винтов (шурупов). Принцип действия таких машин основан на передаче энергии от привода к выходному валу небольшими порциями. Разные машины имеют разные механизмы сцепления и форму, что влияет на передачу силового воздействия и вибрации на рукоятку.
В машинах ударного действия и машинах с храповым механизмом муфты сцепления, как правило, металлические. В ударных машинах на один оборот вала двигателя обычно приходится один или два удара, в то время как у машин с храповым механизмом их число больше. Муфты машин импульсного действия, как правило, содержат гидроусилители для передачи гидравлического воздействия через один или несколько каналов каждый раз, когда вал двигателя совершает оборот относительно выходного вала.
На основе большого числа экспериментов по применению ручных машин в типичных рабочих условиях выявлено, что они обеспечивают сравнительно низкую воспроизводимость результатов испытаний. Поэтому настоящий стандарт устанавливает метод испытаний с использованием имитатора нагрузки. При этом конструкция имитатора выбрана так, чтобы получаемые значения параметра вибрации соответствовали условиям типичного применения ручной машины на рабочем месте.
По сравнению с примененным международным стандартом ИСО 8662-7:1997 в текст настоящего стандарта внесены следующие изменения:
- раздел 1 дополнен ссылками на ГОСТ 12.1.012 и ГОСТ 16519, чтобы показать место стандарта в комплексе стандартов по вибрационной безопасности;
- в разделе 2 международные стандарты заменены на аналогичные межгосударственные и, кроме того, добавлены ГОСТ 12.1.012 и ГОСТ 24346, где установлены используемые в стандарте термины, а также ГОСТ 31192.2 (см. раздел 4, пункты 5.3 и 5.4);
- исключены нормативные ссылки на невведенные ИСО 2787:1984 и ИСО 691:1997 (см. библиографию);
- стандарт дополнен разделом 3 «Термины и определения»;
- в разделе 4 рекомендация измерять среднеквадратичные значения виброускорения в полосах частот заменена на рекомендацию проводить частотный анализ вибрации для выявления низкочастотного сдвига в измеренном сигнале;
- рисунок 1 заменен двумя рисунками, которым присвоены номера 1 и 2; нумерация последующих рисунков соответственно изменена;
- в пункте 5.4 способы крепления датчиков из подрисуночной подписи перенесены в основной текст, добавлена ссылка на ГОСТ 31192.2;
- в подпункте 7.2.3 помимо ссылки на ИСО 691:1997 дополнительно приведены в форме таблицы 1 допуски на размеры гнезда муфты устройства торможения, адаптированные на основе указанного выше международного стандарта, где установлены допуски на размеры гнезд торцевых головок;
- стандарт дополнен пунктом 8.6, в котором установлено правило заявления вибрационной характеристики ручных машин данного вида;
- стандарт дополнен элементом «Библиография», куда перенесены ссылки, использованные в ИСО 8662-7:1997 как нормативные.
МЕЖГОСУДАРСТВЕННЫЙ СТАНДАРТ
|
Ручные машины ИЗМЕРЕНИЯ ВИБРАЦИИ НА РУКОЯТКЕ Часть 7 Гайковерты, шуруповерты и винтоверты ударные, импульсные и трещоточные Hand-held
portable power tools. Measurement of vibrations at the handle. Part 7.
Wrenches, |
(Поправка).
Дата введения - 2008-07-01
1 Область применения
Настоящий стандарт относится к стандартам безопасности типа С (испытательный код по вибрации) согласно классификации ГОСТ 12.1.012 и устанавливает лабораторный метод измерения вибрации на рукоятках гайковертов, шуруповертов и винтовертов с храповым механизмом, ударного или импульсного действия (далее - ручные машины) в целях заявления и подтверждения вибрационной характеристики ручной машины1). Общие требования к методу испытаний ручных машин в целях заявления и подтверждения вибрационной характеристики приведены в ГОСТ 16519.
1) При необходимости данный метод может быть использован в других целях, например, при входном, периодическом или послеремонтном контроле продукции (см. ГОСТ 12.1.012, пункт 4.2).
Полученные в ходе испытаний результаты могут быть использованы для сравнения разных образцов или моделей ручной машины, а также дать ориентировочное представление о том, какая вибрация будет наблюдаться на рабочем месте в условиях выполнения реального рабочего задания.
Настоящий стандарт распространяется на ручные машины с пневматическим или гидравлическим приводом.
Настоящий стандарт распространяется на ручные машины с хвостовиком квадратной или иной формы (или имеющим гнездо квадратной формы) размером от 6 до 40 мм для соединения с насадкой.
Настоящий стандарт не распространяется на ручные машины, совершающие в процессе работы одиночные удары, а также на гайковерты с храповым механизмом срывного действия (по достижении заданного момента затяжки).
2 Нормативные ссылки
В настоящем стандарте использованы ссылки на следующие межгосударственные стандарты:
ГОСТ 12.1.012-2004 Система стандартов безопасности труда. Вибрационная безопасность. Общие требования
ГОСТ 16519-2006 Вибрация. Определение параметров вибрационной характеристики ручных машин и машин с ручным управлением. Общие требования (ИСО 20643:2005 «Вибрация. Машины ручные и машины с ручным управлением. Принципы определения параметров виброактивности», MOD)
ГОСТ 24346-80 Вибрация. Термины и определения
ГОСТ 31192.2-2005 Вибрация. Измерение локальной вибрации и оценка ее воздействия на человека. Часть 2. Требования к проведению измерений на рабочих местах (ИСО 5349-2:2001 «Вибрация. Измерение локальной вибрации и оценка ее воздействия на человека. Часть 2. Практическое руководство по проведению измерений на рабочих местах», MOD)
Примечание - При пользовании настоящим стандартом целесообразно проверить действие ссылочных стандартов на территории государства по соответствующему указателю стандартов, составленному по состоянию на 1 января текущего года, и по соответствующим информационным указателям, опубликованным в текущем году. Если ссылочный стандарт заменен (изменен), то при пользовании настоящим стандартом следует руководствоваться заменяющим (измененным) стандартом. Если ссылочный стандарт отменен без замены, то положение, в котором дана ссылка на него, применяют в части, не затрагивающей эту ссылку.
3 Термины и определения
В настоящем стандарте применяют термины по ГОСТ 12.1.012, ГОСТ 16519 и ГОСТ 24346.
4 Измеряемые величины
В процессе испытаний измеряют:
- среднеквадратичное значение корректированного виброускорения по ГОСТ 16519;
- давление воздуха или жидкости в системе питания;
- частоту ударов хвостовика;
- силу нажатия на ручную машину оператором;
- частоту вращения исполнительного устройства.
Значительные ускорения, производимые ручными машинами данного вида в процессе их работы, могут вызывать паразитный низкочастотный сигнал на выходе датчика вибрации (см., например, ГОСТ 31192.2). Для того, чтобы убедиться в отсутствии низкочастотного сдвига, рекомендуется в процессе испытаний проводить частотный анализ вибрации.
5 Средства измерений
5.1 Общие положения
Требования к средствам измерений - по ГОСТ 16519.
Требования к датчикам вибрации - по ГОСТ 16519.
Если машины снабжены легкими рукоятками, например, изготовленными из пластика, их не следует нагружать датчиками и устройствами крепления большой массы. Если рукоятка работает как механический фильтр, легкий датчик приклеивают непосредственно к поверхности рукоятки; в этом случае масса датчика вибрации вместе с соединительным кабелем и устройством крепления не должна превышать 5 г.
Для измерения вибрации применяют механические фильтры по ГОСТ 16519 (см. также ГОСТ 31192.2), за исключением случаев, указанных в 5.2.
5.4 Крепление датчиков вибрации
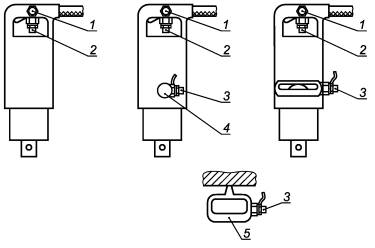
Крепление датчика вибрации и механического фильтра должно соответствовать требованиям ГОСТ 16519 (см. рисунки 1 и 2).
В случае прямой ручной машины датчик вибрации устанавливают с помощью адаптера, который приклеивают к рукоятке или закрепляют на ней хомутом (см. рисунок 1).
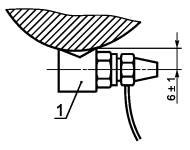
1 - алюминиевый адаптер
Рисунок 1 - Крепление датчика вибрации на рукоятку прямой машины
На рукоятку пистолетного или лучкового типа, а также на поддерживающую рукоятку прямого типа датчик вибрации может быть закреплен одним из следующих способов (см. рисунок 2):
- с использованием хомута, к которому приварен или припаян переходный блок (см. рисунок 2А);
- с использованием адаптера (фиксируемого пластиковыми лентами) с резьбовым соединением для установки датчика (см. рисунок 2В);
- приклеиванием датчика к плоской поверхности (см. рисунок 2С);
- предварительной подготовкой плоской поверхности, высверливанием отверстия и нарезанием резьбы для установки датчика (см. рисунок 2D).
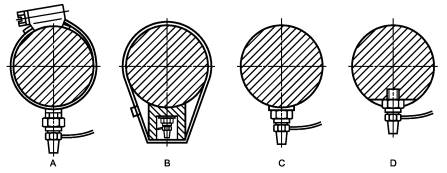
Рисунок 2 - Способы крепления датчика вибрации на рукоятку пистолетного или лучкового типа
При установке датчика вибрации следует руководствоваться рекомендациями изготовителя. Дополнительные рекомендации по креплению датчиков вибрации приведены в ГОСТ 31192.2.
Выбранный способ крепления датчика вибрации указывают в протоколе испытаний.
5.5 Вспомогательное оборудование
Давление подачи воздуха или жидкости в систему питания измеряют прецизионными манометрами (см., например, [1]).
Силу нажатия измеряют устройством, обеспечивающим неопределенность измерений не более ± 1 Н.
Частоту ударов хвостовика измеряют с помощью электронных фильтров, используя для этого сигнал датчика вибрации, или другими подходящими способами.
5.6 Калибровка
Калибровку выполняют в соответствии с ГОСТ 16519.
6 Точки и направления измерений
Измерения вибрации проводят в точках и направлениях, показанных на рисунке 3, в зависимости от типа ручной машины.
Обычно датчик вибрации устанавливают в точке посередине рукоятки. Если такому размещению датчика вибрации мешает положение пускового устройства, то его устанавливают по возможности ближе к указанной точке.
Для ручной машины с рукояткой прямого типа датчик вибрации устанавливают на расстоянии (6 ± 1) мм от поверхности рукоятки так, чтобы направление измерений было параллельно оси вала двигателя, как показано на рисунках 1 и 3а).
7 Условия испытаний
Для испытаний используют новую, смазанную ручную машину, обеспеченную соответствующим техническим уходом.
Ручные машины с гидравлическим приводом до начала проведения измерений прогревают в течение 10 мин. Пневматические машины прогрева не требуют. Время прогрева зажимных устройств при работе ручной машины на устройстве нагружения, описанном в 7.2 - 20 с.
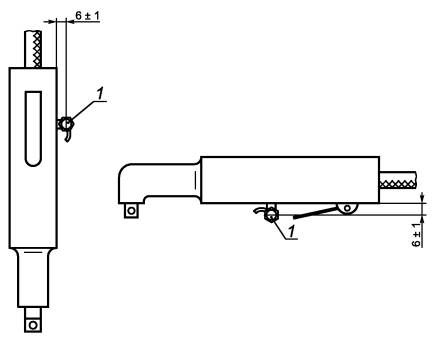
1 - датчик вибрации
а) Ручная машина с рукояткой прямого типа, параллельной оси двигателя (выходной вал может быть параллелен валу двигателя или находиться под углом к нему)
1 - датчик 1; 2
- датчик 2; 3 - датчик 3; 4 - поддерживающая рукоятка прямого
типа;
5 - поддерживающая рукоятка лучкового типа
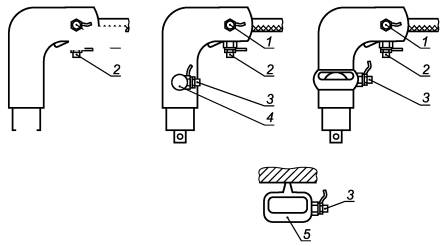
b) Ручная машина с рукояткой пистолетного типа (поддерживающая рукоятка может присутствовать или отсутствовать; выходной вал может быть параллелен валу двигателя или находиться под углом к нему)
Рисунок 3 - Направления измерений и примеры размещения датчика вибрации, лист 1
1 - датчик 1; 2
- датчик 2; 3 - датчик 3; 4 - поддерживающая рукоятка прямого
типа;
5 - поддерживающая рукоятка лучкового типа
с) Ручная машина с рукояткой лучкового типа (поддерживающая рукоятка может присутствовать или отсутствовать; выходной вал может быть параллелен валу двигателя или находиться под углом к нему)
Рисунок 3 - Направления измерений и примеры размещения датчика вибрации, лист 2
В процессе испытания ручная машина должна работать в номинальных условиях питания в соответствии с требованиями, определенными изготовителем. Для пневматических машин воздух подают по шлангу длиной не менее 2 м, подсоединенному к ручной машине через резьбовой переходник и закрепленному зажимом. Применение приспособлений для быстрого соединения не допускается. Работа ручной машины должна быть стабильной и плавной (см. 7.3).
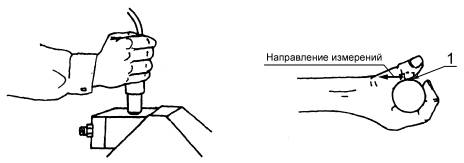
В процессе испытаний устройство нагружения устанавливают так, чтобы оператор мог работать в комфортных условиях (выпрямившись или почти выпрямившись), а выходной вал ручной машины был расположен вертикально. Положение руки и запястья - в соответствии с рисунком 4 (независимо от типа испытуемой ручной машины).
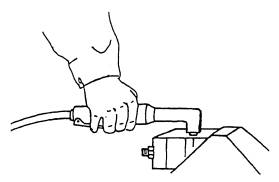
а) Угловая ручная машина с прямой рукояткой [см. рисунок 3а), справа] (рука оператора расположена в плоскости двигателя и выходного вала перпендикулярно к рукоятке)
1 - датчик (расположен за большим пальцем кисти руки)
b) Прямая ручная машина с прямой рукояткой [см. рисунок 3а), слева] (рука оператора расположена горизонтально и перпендикулярно к рукоятке; измерительная ось датчика вибрации параллельна предплечью оператора)
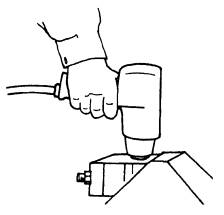
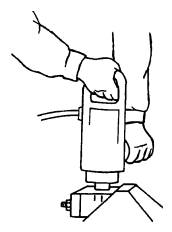
с) Ручная машина с рукояткой пистолетного типа, без поддерживающей рукоятки [см. рисунок 3b), слева] и хвостовиком размером до 10 мм включительно (оператор удерживает ручную машину одной рукой)
Рисунок 4 - Рабочие позы оператора, лист 1
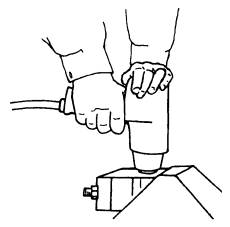
d) Ручная машина с рукояткой пистолетного или лучкового типа, без поддерживающей рукоятки [см. рисунки 3b), слева и 3c), слева] и хвостовиком размером свыше 10 мм (оператор выполняет задание с использованием обеих рук)
е) Ручная машина с основной и поддерживающей рукоятками [см. рисунки 3b), в центре и справа, и 3c), в центре и справа] (рука оператора на поддерживающей рукоятке, насколько возможно, параллельна оси двигателя)
Рисунок 4 - Рабочие позы оператора, лист 2
7.2.1 Общие положения
В процессе испытаний для нагружения ручной машины используют специальное устройство торможения, позволяющее получить стабильную частоту вращения выходного вала, равную (0,15 ± 0,05) с-1. Примеры конструкции двух таких устройств приведены в приложении В.
7.2.2 Устройство торможения
Устройство торможения состоит из:
- стального основания, в котором устанавливают внутренний блок торможения;
- двух блоков торможения из фенопласта, которые замедляют вращение муфты с гнездом;
- стальной пластины для закрепления внешнего блока торможения;
- двух стальных накладок;
- муфты с гнездом, приводимой во вращение валом ручной машины;
- болтов с нажимными пружинами и гаек, обеспечивающих необходимое прижатие муфты к блоку торможения;
- крепежных винтов для предотвращения перемещений муфты в осевом направлении.
Форма и размеры деталей устройства торможения приведены в приложении В.
Нажимные пружины устанавливают так, чтобы обеспечивать постоянное давление в области контакта; для этого они должны быть сжаты примерно до половины своей длины при достижении выходным валом ручной машины заданной скорости вращения.
Поверхность контакта муфты с блоком торможения должна быть смазана, например тонким слоем консистентной смазки, загущенной медным мылом. При необходимости обеспечить более высокий коэффициент трения на поверхность контакта можно нанести трансмиссионное масло с противозадирными присадками.
Для дополнительного воздушного охлаждения трущихся поверхностей просверливают небольшие отверстия в нижней накладке.
Устройство торможения после его установки не должно иметь существенных резонансов, способных оказать влияние на результат испытаний. С этой целью стальное основание можно жестко закрепить болтами на бетонном блоке массой не менее 400 кг.
7.2.3 Определение размеров муфты и блока торможения
Помимо обеспечения приложения тормозящего момента к валу ручной машины, устройство торможения должно также имитировать реальную инерционную нагрузку на вал, для чего для конкретной ручной машины подбирают соответствующие размеры муфты.
В приложении В приведены сочетания размеров муфты и блока торможения только для наиболее типичных размеров хвостовика квадратной формы:
a) «Устройство торможения малое» - для ручных машин с размером хвостовика 6,3; 10, 12,5 и 16 мм;
b) «Устройство торможения большое» - для ручных машин с размером хвостовика 20; 25 и 40 мм.
Для других ручных машин может потребоваться применение муфты и блока торможения других размеров. Следует рассмотреть возможность применения специального адаптера между выходным валом и гнездом муфты стандартной формы. В этом случае применяемый адаптер должен иметь максимально малые размеры (т.е. размер гнезда должен в наибольшей степени соответствовать размерам выступа хвостовика). Допуски на размеры гнезда квадратной формы приведены в таблице 1 (на основе [2]).
Таблица 1 - Допуски на размеры гнезда муфты устройства торможения
В миллиметрах
|
Допуск |
||
|
минимальный |
максимальный |
|
|
6,3 |
+0,03 |
+0,15 |
|
10 |
+0,03 |
+0,18 |
|
12,5 |
+0,04 |
+0,24 |
|
16 |
+0,04 |
+0,30 |
|
20 |
+0,05 |
+0,36 |
|
25 |
+0,06 |
+0,46 |
|
40 |
+0,08 |
+0,58 |
При испытаниях ручная машина должна развивать максимальную мощность при вращении выходного вала по часовой стрелке (или, если конструкция ручной машины допускает только такое движение, против часовой стрелки). Устройство торможения должно быть отрегулировано так, чтобы обеспечить скорость вращения муфты (0,15 ± 0,05) с-1.
Если ручная машина имеет устройство регулировки момента вращения, измерения проводят в положении этого устройства, позволяющем развивать максимальный момент вращения.
Некоторые ручные машины перед проведением серии испытаний необходимо прогреть (см. 7.1). Для поддержания постоянной рабочей температуры и момента вращения гидравлических импульсных
машин время между окончанием прогрева и началом первой серии измерений, а также между последующими сериями должно быть не менее 5 с и не более 60 с.
Ось выходного вала ручной машины должна совпадать с осью муфты устройства торможения. Это может потребовать специальной тренировки оператора перед началом проведения измерений.
7.4 Сила нажатия
В процессе испытания оператор прикладывает к ручной машине силу нажатия в пределах ±50 % веса ручной машины. Силу нажатия можно контролировать по показаниям весов, на которых стоит оператор. Приложенная сила нажатия должна обеспечивать стабильную работу ручной машины во время испытания.
Если конструкцией ручной машины предусмотрен автоматический пуск при превышении заданного значения силы нажатия, то сила нажатия должна быть такой, чтобы обеспечить работу машины в соответствии с рекомендациями изготовителя.
8 Метод измерений и оценка достоверности полученных результатов
Давление в системе питания ручной машины измеряют и поддерживают в соответствии с рекомендациями изготовителя (см. также [1]).
В испытании участвуют три опытных оператора, для каждого из которых проводят серию измерений с испытуемой ручной машиной. В процессе испытаний оператор удерживает ручную машину и работает с ней способом, типичным для ее нормального применения.
Испытания должны состоять не менее чем из пяти измерений при нагружении ручной машины устройством торможения. Время каждого измерения - не менее 4 с.
8.3 Достоверность результатов испытаний
Для каждого оператора измерения продолжают до тех пор, пока не будет получена достоверная серия измерений, т.е. пока коэффициент вариации (см. 8.4), полученный для среднеквадратичного значения корректированного виброускорения в пяти последовательных измерениях с участием одного оператора, не будет менее 0,15 или пока стандартное отклонение для этой серии не будет менее 0,30 м/с2.
Коэффициент вариации Cv для серии испытаний
определяют как отношение стандартного отклонения sn-1
для результатов измерений в этой серии к их среднеарифметическому значению ![]() :
:
![]()
где  - стандартное
отклонение результатов измерений;
- стандартное
отклонение результатов измерений;
![]() - среднеарифметическое
значение результатов измерений;
- среднеарифметическое
значение результатов измерений;
xi - результат i-го измерения;
n - число измерений.
Вычисляют среднеарифметическое значение для каждого положения датчика вибрации для каждого оператора. После этого для каждого положения датчика вибрации определяют общее среднеарифметическое значение по трем операторам. Максимальное из среднеарифметических значений по всем положениям датчика вибрации служит основой для заявления вибрационной характеристики ручной машины.
8.6 Заявляемая вибрационная характеристика
В качестве вибрационной характеристики ручной машины указывают максимальное среднеарифметическое значение среднеквадратичного значения корректированного виброускорения по 8.5 и неопределенность измерений K по ГОСТ 16519, пункт 8.2.
9 Протокол испытаний
Протокол испытания - по ГОСТ 16519. Кроме того, в протоколе испытаний указывают:
a) параметры муфты (длину, внешний диаметр) и адаптера (если использовался);
b) скорость вращения муфты;
c) давление воздуха или жидкости в системе питания или другие характеристики системы питания;
d) частоту ударов хвостовика;
e) силу нажатия;
f) результат измерений вибрации (см. 8.5);
g) схему ручной машины с указанием положения рукояток и мест установок датчиков вибрации. Форма протокола испытаний приведена в приложении А.
Приложение А
(рекомендуемое)
Форма протокола испытаний
Результаты испытаний (Результаты представляют в форме среднеквадратичного значения корректированного виброускорения в виде таблиц) Среднеквадратичные значения корректированного виброускорения - Оператор А
Среднеквадратичные значения корректированного виброускорения - Оператор В
Среднеквадратичные значения корректированного виброускорения - Оператор С
Максимальное среднеарифметическое значение, м/с2: |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
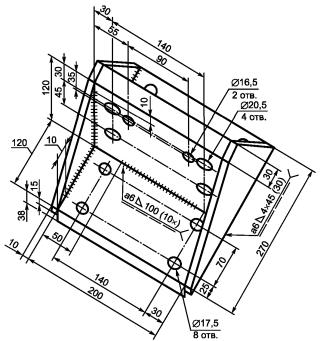
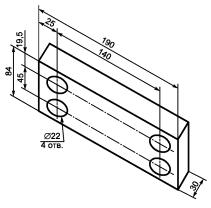
Приложение В
(рекомендуемое)
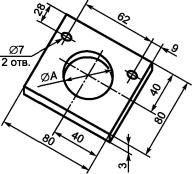
Устройство торможения. Сборочные чертежи и спецификации
В.1 Устройство торможения большое для ручных машин с размерами хвостовика 20, 25 и 40 мм (см. рисунок В.1, таблица В.1)
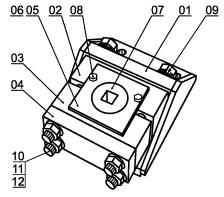
Рисунок В.1
Таблица В.1
|
Деталь |
№ |
Материал |
Число деталей для разных размеров хвостовика, мм |
|||
|
20 |
25 |
40 |
||||
|
01 |
Основание |
1001 |
Конструкционная сталь |
|
|
|
|
02 |
Блок торможения большой |
1002-01 |
Фенопласт (плотный) |
|
- |
- |
|
02 |
Блок торможения большой |
1002-02 |
Фенопласт (плотный) |
- |
|
|
|
03 |
Блок торможения большой |
1002-03 |
Фенопласт (плотный) |
|
- |
- |
|
03 |
Блок торможения большой |
1002-04 |
Фенопласт (плотный) |
- |
|
|
|
04 |
Пластина большая |
1004 |
Инструментальная сталь |
|
|
|
|
05 |
Накладка большая верхняя |
1006-01 |
Общетехническая сталь |
|
- |
- |
|
05 |
Накладка большая верхняя |
1006-02 |
Общетехническая сталь |
- |
|
|
|
06 |
Накладка большая нижняя |
1007 |
Общетехническая сталь |
|
|
|
|
07 |
Муфта с гнездом |
1011-01 |
Общетехническая сталь |
|
- |
- |
|
07 |
Муфта с гнездом |
1011-02 |
Общетехническая сталь |
- |
1 |
- |
|
07 |
Муфта с гнездом |
1012 |
Общетехническая сталь |
- |
- |
1 |
|
08 |
Болт М8×100 |
|
|
2 |
2 |
2 |
|
09 |
Нажимная пружина 40/20,4/2,25 (прибл.) |
|
|
40 |
40 |
40 |
|
10 |
Болт М20×250 |
|
|
4 |
4 |
4 |
|
11 |
Гайка М20 |
|
|
4 |
4 |
4 |
|
12 |
Плоская шайба 37×21,3×3,3 (прибл.) |
|
Общетехническая сталь |
8 |
8 |
8 |
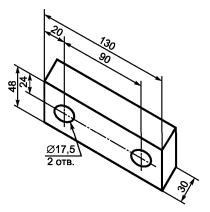
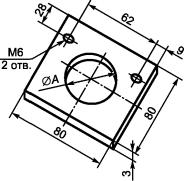
В.2 Устройство торможения малое для ручных машин с размером хвостовика 6,3; 10; 12,5 и 16 мм (см. рисунок В.2, таблица В.2)
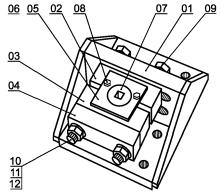
Рисунок В.2
Таблица В.2
|
Деталь |
№ |
Материал |
Число деталей для разных размеров хвостовика, мм |
||||
|
6,3 (1/4) |
10 (3/8) |
12,5 (1/2) |
16 (5/8) |
||||
|
01 |
Основание |
1001 |
Конструкционная сталь |
1 |
1 |
1 |
1 |
|
02 |
Блок торможения малый |
1003-01 |
Фенопласт (плотный) |
1 |
- |
- |
- |
|
02 |
Блок торможения малый |
1003-02 |
Фенопласт (плотный) |
- |
1 |
- |
- |
|
02 |
Блок торможения малый |
1003-03 |
Фенопласт (плотный) |
- |
- |
1 |
1 |
|
03 |
Блок торможения малый |
1003-04 |
Фенопласт (плотный) |
1 |
- |
- |
- |
|
03 |
Блок торможения малый |
1003-05 |
Фенопласт (плотный) |
- |
1 |
- |
- |
|
03 |
Блок торможения малый |
1003-06 |
Фенопласт (плотный) |
- |
- |
1 |
1 |
|
04 |
Пластина малая |
1005 |
Инструментальная сталь |
1 |
1 |
1 |
1 |
|
05 |
Накладка малая верхняя |
1008-01 |
Общетехническая сталь |
1 |
1 |
- |
- |
|
05 |
Накладка малая верхняя |
1008-02 |
Общетехническая сталь |
- |
- |
1 |
1 |
|
06 |
Накладка малая нижняя |
1009 |
Общетехническая сталь |
1 |
1 |
1 |
1 |
|
07 |
Муфта с гнездом |
1010-01 |
Общетехническая сталь |
1 |
- |
- |
- |
|
07 |
Муфта с гнездом |
1010-02 |
Общетехническая сталь |
- |
1 |
- |
- |
|
07 |
Муфта с гнездом |
1010-03 |
Общетехническая сталь |
- |
- |
1 |
- |
|
07 |
Муфта с гнездом |
1010-04 |
Общетехническая сталь |
- |
- |
- |
1 |
|
08 |
Болт М6×60 |
|
|
2 |
2 |
2 |
2 |
|
09 |
Нажимная пружина 31,5/16,3/1,76 (прибл.) |
|
|
20 |
20 |
20 |
20 |
|
10 |
Болт М16×200 |
|
|
2 |
2 |
2 |
2 |
|
11 |
Гайка М16 |
|
|
2 |
2 |
2 |
2 |
|
12 |
Плоская шайба 30×17,3×3,3 (прибл.) |
|
Общетехническая сталь |
4 |
4 |
4 |
4 |
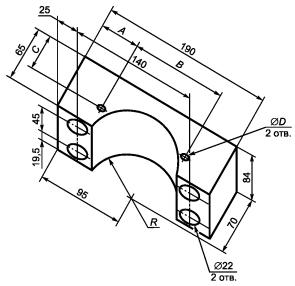
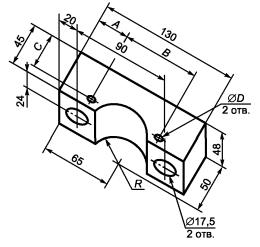
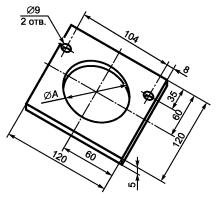
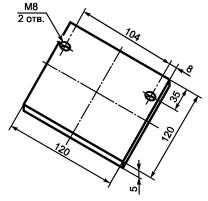
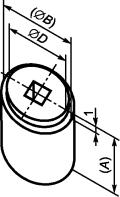
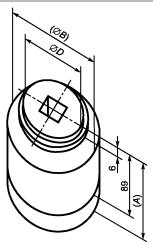
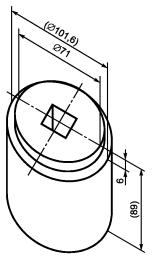
В.3 Детали устройства торможения (таблица В.3)
Таблица В.3
|
Материал |
Эскиз |
|||||||||||||||||||||||||||||||||||||||||||||||||
|
Основание, 1001 |
Конструкционная сталь |
|
||||||||||||||||||||||||||||||||||||||||||||||||
|
Блок торможения большой, 1002 |
Фенопласт (плотный) |
|
||||||||||||||||||||||||||||||||||||||||||||||||
|
Блок торможения малый, 1003 |
Фенопласт (плотный) |
|
||||||||||||||||||||||||||||||||||||||||||||||||
|
Пластина большая, 1004 |
Инструментальная сталь |
|
||||||||||||||||||||||||||||||||||||||||||||||||
|
Пластина малая, 1005 |
Инструментальная сталь |
|
||||||||||||||||||||||||||||||||||||||||||||||||
|
Накладка большая верхняя, 1006 |
Общетехническая сталь |
|
||||||||||||||||||||||||||||||||||||||||||||||||
|
Накладка большая нижняя, 1007 |
Общетехническая сталь |
|
||||||||||||||||||||||||||||||||||||||||||||||||
|
Накладка малая верхняя, 1008 |
Общетехническая сталь |
|
||||||||||||||||||||||||||||||||||||||||||||||||
|
Накладка малая нижняя, 1008 |
Общетехническая сталь |
|
||||||||||||||||||||||||||||||||||||||||||||||||
|
Муфта с гнездом, 1010 |
Общетехническая сталь |
|
||||||||||||||||||||||||||||||||||||||||||||||||
|
Муфта с гнездом, 1011 |
Общетехническая сталь |
|
||||||||||||||||||||||||||||||||||||||||||||||||
|
Муфта с гнездом, 1012 |
Общетехническая сталь |
|
||||||||||||||||||||||||||||||||||||||||||||||||
Приложение С
(справочное)
Изменение структуры настоящего стандарта по отношению к ИСО 8662-7:1997
Указанное в таблице С.1 изменение структуры межгосударственного стандарта относительно структуры примененного международного стандарта обусловлено приведением в соответствие с требованиями ГОСТ 1.5.
Таблица С.1
|
Структура настоящего стандарта |
|||
|
Раздел |
Пункт |
Раздел |
Пункт |
|
- |
|
|
|
|
3 |
|
|
|
|
4 |
|
|
|
|
5 |
|
|
|
|
6 |
|
|
|
|
7 |
7.1 |
||
|
7.2 |
|||
|
7.3 |
|||
|
7.4 |
|||
|
7.5 |
|||
|
- |
|||
|
8 |
|
|
|
|
Примечание - Структурные элементы настоящего стандарта и международного стандарта ИСО 8662-7:1997, не указанные в данной таблице, идентичны. |
|||
Библиография
|
ИСО 2787:1984 |
Инструменты пневматические ротационные и ударные - Эксплуатационные испытания |
|
|
|
(ISO 2787:1984) |
(Rotary and percussive pneumatic tools - Performance tests) |
|
ИСО 691:1997 |
Инструмент для сборки резьбовых соединений - Зевы гаечного и торцового ключей - Допуски для ключей общего применения |
|
|
|
(ISO 691:1997) |
(Assembly tools for screws and nuts - Wrench and socket openings - Tolerances for general use) |
Ключевые слова: ручные машины, вибрационная характеристика, испытания, испытательный код по вибрации, гайковерты, винтоверты, шуруповерты, измерения, воспроизводимость, заявление, подтверждение