 | Информационная система | |
ГОСУДАРСТВЕННЫЙ КОМИТЕТ СССР ПО СТАНДАРТАМ
МЕТОДИЧЕСКИЕ
УКАЗАНИЯ
НОРМИРОВАНИЕ И ОПРЕДЕЛЕНИЕ МЕТРОЛОГИЧЕСКИХ
ХАРАКТЕРИСТИК ИЗМЕРИТЕЛЬНЫХ ПРЕОБРАЗОВАТЕЛЕЙ
КОДА В ПОСТОЯННОЕ НАПРЯЖЕНИЕ И ТОК
РД 50-206-80
Москва
ИЗДАТЕЛЬСТВО СТАНДАРТОВ
РАЗРАБОТАНЫ Всесоюзным научно-исследовательским институтом метрологии измерительных и управляющих систем научно-производственного объединения «Система»
Генеральный директор Е.Т. Удовиченко
Начальник отдела А.А. Брагин
Руководитель работы А.Л. Семенюк
Ответственный исполнитель В.И. Бородатый
Исполнитель И.Г. Средина
ВНЕСЕНЫ Управлением метрологии Государственного комитета СССР по стандартам
Начальник Управления метрологии Л.К. Исаев
УТВЕРЖДЕНЫ И ВВЕДЕНЫ В ДЕЙСТВИЕ Постановлением Госстандарта от 11 июля 1980 г. № 3562
РУКОВОДЯЩИЙ НОРМАТИВНЫЙ ДОКУМЕНТ
|
Нормирование и определение метрологических |
РД 50-206-80 Введены впервые |
Утверждены Постановлением Госстандарта от 11 июля 1980 г. № 3562, срок введения установлен с 1 июля 1981 г.
Методические указания содержат требования к нормированию и определению метрологических характеристик (MX) измерительных преобразователей кода в постоянное напряжение и ток как вновь разрабатываемых, так и выпускаемых серийно при плановом пересмотре документации последних.
1. ОБЩИЕ ПОЛОЖЕНИЯ
1.1. Методические указания распространяются на измерительные преобразователи кода в постоянное напряжение и ток (в дальнейшем - преобразователи), имеющие самостоятельное конструктивное оформление.
1.2. Методические указания устанавливают комплекс нормируемых MX, форму представления нормируемых MX в нормативно-технической документации и методы экспериментального определения MX, служащих для сравнения с нормируемыми.
1.3. Методические указания развивают положения ГОСТ 14015-68 в части методов нормирования и экспериментального определения MX преобразователей Государственной системы промышленных приборов и средств автоматизации и регламентируют способы нормирования MX в соответствии с ГОСТ 8.009-72 для всех преобразователей (п. 1.1).
1.4. В обоснованных случаях по согласованию с Госстандартом допускается нормировать MX и использовать методы их определения, отличные от приведенных в данных методических указаниях.
1.5. Методические указания могут быть использованы для нормирования и определения MX управляемых кодом делителей напряжения и тока, имеющих самостоятельное конструктивное оформление.
2. НОРМИРУЕМЫЕ МЕТРОЛОГИЧЕСКИЕ ХАРАКТЕРИСТИКИ
2.1. Комплекс MX преобразователей следует составлять с учетом требований ГОСТ 8.009-72 и включать следующие MX.
2.1.1. MX, определяющие номинальную характеристику преобразователей: входной код, число разрядов кода, диапазон изменения значений кода, номинальную цену единицы младшего разряда кода, диапазон изменения выходного сигнала.
2.1.2. Характеристики погрешности Δ преобразователей данного типа:
а) предел допускаемого значения погрешности Δд;
б) предел допускаемой
систематической составляющей Δс.д и предел допускаемого среднего квадратического отклонения случайной составляющей погрешности σд(![]() ).
).
2.1.3. Характеристики погрешности, обусловленной нелинейностью статической характеристики преобразования:
а) предел допускаемого значения интегральной нелинейности Δи.н.пр.;
б) предел допускаемого значения дифференциальной нелинейности Δд.н.пр.
2.1.4. Динамические характеристики преобразователя:
а) переходный процесс на выходе преобразователя h(t);
б) время установления tу;
в) амплитуда максимального выброса А.
Допускается нормировать и другие параметры переходного процесса, необходимые для правильной эксплуатации конкретного преобразователя.
2.1.5. Выходной импеданс zвых.
2.1.6. Неинформативные параметры входного и выходного сигналов.
2.1.7. Наибольшие допускаемые изменения MX, вызванные изменениями внешних влияющих величин и неинформативных параметров входного сигнала.
2.1.8. Характеристики погрешности А преобразователя в интервале влияющей величины или неинформативного параметра входного сигнала.
2.1.9. Класс точности.
2.2. MX (пп. 2.1.2 - 2.1.6) следует нормировать для нормальных или рабочих условий применения преобразователей.
2.3. MX (пп. 1.2.7 и 1.2.8) следует нормировать для рабочих условий применения преобразователей.
2.4. MX следует нормировать для рабочих условий применения в тех случаях, когда наибольшее изменение MX, вызванное изменениями влияющих величин в пределах рабочих условий применения, не превышает 20 % нормированного значения MX.
2.5. MX следует нормировать для нормальных условий применения в тех случаях, когда наибольшие изменения MX, вызванные изменениями влияющих величин в пределах рабочих условий применения, превышают 20 % нормированного значения MX.
2.6. В обоснованных случаях по согласованию с Госстандартом допускается не нормировать динамические характеристики (п. 2.1.4 а, в).
2.7. Класс точности устанавливается в случаях, когда преобразователи являются мерой постоянного напряжения и тока.
2.8. Если преобразователь имеет несколько поддиапазонов, MX нормируют для каждого поддиапазона.
3. СПОСОБЫ НОРМИРОВАНИЯ И ФОРМЫ ПРЕДСТАВЛЕНИЯ МЕТРОЛОГИЧЕСКИХ ХАРАКТЕРИСТИК
3.1. Класс точности устанавливается по значению предела погрешности преобразователей данного типа в нормальных условиях применения.
Класс точности преобразователя обозначается c/d, где с - величина, численно равная значению относительной погрешности в конце шкалы в %, d - постоянная величина в %.
Значения с и d выбираются из чисел ряда (10; 6; 5; 4; 2,5; 2; 1,5) · 10-n, где n - целое положительное число.
Примечание. Класс точности не устанавливается для преобразователей, погрешность Δ которых нормируется по п. 2.1.2 б.
3.2. Предел допускаемой относительной погрешности преобразователя не должен превышать значений, определяемых по формуле:
где х - значение выходной величины; хк - конечное значение рабочего диапазона выходной величины.
В случае, когда класс точности не указывается, допускается представлять характеристики погрешности преобразователей функциональной зависимостью, таблицей или графиком по ГОСТ 22261-76.
3.3. Предел допускаемого значения интегральной нелинейности Δи.н.пр (п. 2.1.3 а) должен быть указан в единицах младшего разряда.
3.4. Предел допускаемого значения дифференциальной нелинейности Δд.н.пр (п. 2.1.3 б) должен быть указан в единицах младшего разряда.
B случае, когда каждое приращение выходного сигнала при последовательной смене значений входного кода не отрицательно, следует указывать «характеристика преобразования монотонна»; в противном случае указывать «характеристика преобразователя немонотонна».
3.5. Время установления ty (п. 2.1.4 б) следует нормировать путем указания предельного значения.
3.6. Предельное значение времени установления ty следует устанавливать исходя из чисел ряда: 10; 8; 5; 4; (3); 2,5; 2; 1,5. Числа больше 10 и меньше 1 получаются умножением соответственно на 10n и 10-n, где п - целое положительное число.
3.7. Переходный процесс на выходе преобразователя h(t) (п. 2.1.4 а) следует нормировать в аналитической, графической или табличной форме путем указания номинальной функции и границ допускаемых отклонений (или граничных функций).
Амплитуду выброса следует нормировать путем указания предельного значения в процентах от установившегося значения выходного сигнала.
3.8. Выходной импеданс zвых преобразователя (п. 2.1.5) задается в виде выходного сопротивления Rвых и выходной емкости Свых.
3.9. Способы нормирования неинформативных параметров входного и выходного сигналов устанавливают в технических условиях на преобразователи данного типа.
3.10. Наибольшие допускаемые изменения MX должны быть нормированы отдельно для каждого влияющего фактора (параметра).
3.11. Наибольшие допускаемые изменения MX должны быть нормированы в виде границ зоны вокруг действительного значения данной MX при нормальных условиях. Границы зоны указывают в единицах данной MX или в процентах от ее значения, нормированного для нормальных условий.
3.12. MX в диапазоне изменения влияющей величины должны быть нормированы так же, как MX в нормальных условиях применения.
4. МЕТОДЫ ЭКСПЕРИМЕНТАЛЬНОГО ОПРЕДЕЛЕНИЯ И ВЫЧИСЛЕНИЯ ОЦЕНОК МЕТРОЛОГИЧЕСКИХ ХАРАКТЕРИСТИК
4.1. Значение погрешности Δ определяется методом прямого или косвенного измерения разности номинального и действительного значений выходного сигнала преобразования при одинаковых значениях входного кода (п. 1 приложения 1).
Погрешность Δ оценивается как наибольшее по абсолютному значению из экспериментально полученных значений погрешности. Для выбора поверяемых точек может быть использована методика, изложенная в приложении 2.
4.2. Составляющие погрешности Δ оценивают следующим образом.
4.2.1. Систематическую составляющую погрешности оценивают по формуле
где Δi - i-я реализация погрешности; п - число опытов при определении погрешности (число п указывается в нормативно-технической документации на конкретный тип преобразователя). Перед каждым измерением входной код сбрасывается до соответствующего нулевому значению выходного сигнала.
4.2.2. Среднее квадратическое отклонение случайной составляющей погрешности оценивают по формуле
 (3)
(3)
Примечание. Время для проведения п опытов задают в нормативно-технической документации на конкретный тип преобразователей.
4.3. Значение интегральной нелинейности Δи.н определяют путем измерения разности между значениями реальной статической характеристики преобразователя и прямой, линеаризирующей данную MX по критерию min(Δи.н.max), т.е. минимальности значения Δи.н.max при одинаковых значениях входного сигнала (п. 2 приложения 1). Допускается в обоснованных случаях осуществлять линеаризацию по критерию наименьших квадратов или соединением начальной и конечной точек статической характеристики, если при этом полученные прямые, линеаризирующие реальную статическую характеристику, не отличаются друг от друга более чем на значение кванта при одинаковых значениях входного кода.
4.4. Значение дифференциальной нелинейности Δд.н определяют путем нахождения разности изменения выходного сигнала при последовательной смене значений входного кода и номинального значения младшего разряда (п. 3 приложения 1).
4.5. Время установления ty определяют путем измерения интервала от момента скачкообразного изменения значения входного кода t0 до момента, начиная с которого значение выходного сигнала преобразователя отличается от установившегося не более чем на предел допускаемого значения погрешности (п. 4 приложения 1):
а) при изменении значений входного кода, определяющем максимальное значение ty (например, для однополярного преобразователя с двоичным входным кодом при изменении значений кода от минимального до максимального в прямом и обратном направлениях);
б) при изменении значений входного кода на единицу младшего разряда (например, для однополярного преобразователя с двоичным кодом при смене старшего разряда на сумму младших разрядов в прямом или обратном направлении).
Примечание. Моментом t0 следует считать центр интервала времени Δt, за который происходит изменение значений кода; при этом значение Δt не должно превышать предельного значения погрешности измерения ty.
4.6. Переходный процесс на выходе преобразователя h(t) следует определять путем подачи на вход кодового сигнала, изменяющегося от нулевого до максимального значения и обратно, и регистрации выходного сигнала преобразователя (пп. 5, 6 приложения 1).
4.7. Амплитуду максимального выброса А переходного процесса определяют путем измерения наибольшего отклонения выходного сигнала от его установившегося значения при максимальном изменении значений входного кода (пп. 5, 6 приложения 1).
4.8. Составляющие выходного импеданса измеряют раздельно.
4.8.1. Выходное сопротивление Rвых (п. 3.8) измеряют при минимальном и максимальном значениях входного кода путем подключения и отключения сопротивления нагрузки Rн и измерения выходного напряжения преобразователя образцовым прибором. В обоснованных случаях допускается определять Rвых х при одном значении входного кода.
4.8.2. Выходную емкость Свых (п. 3.8) измеряют путем подачи на вход преобразователя периодической смены значений входного кода с минимального на максимальное и наоборот с частотой не более f ≤ 1/ty; длительность переходных процессов в выходной цепи преобразователя определяет Свых.
4.9. В нормативно-технических документах, определяющих методику проведения испытаний конкретных видов преобразователей, должны быть указаны:
а) алгоритм выбора поверяемых точек (приложение 2) либо непосредственно значения входных кодовых сигналов, при которых следует определять значения MX;
б) алгоритм проведения линеаризирующей прямой, относительно которой определяется интегральная нелинейность преобразователей.
4.10. Алгоритм выбора поверяемых точек, а также конкретные значения входного кода, при которых следует определять значения MX, должны устанавливаться таким образом, чтобы обеспечить выявление максимальных значений соответствующих MX.
ПРИЛОЖЕНИЕ 1
Справочное
СХЕМЫ ИЗМЕРЕНИЙ НОРМИРУЕМЫХ МЕТРОЛОГИЧЕСКИХ ХАРАКТЕРИСТИК
1. Погрешность Δ (п. 4.1) может быть определена по схеме измерения, представленной на рис. 1, путем параллельной подачи кодов на образцовый и поверяемый преобразователи и измерения разности их выходных сигналов в диапазоне изменения входных кодов, а также с использованием схемы измерений, включающей генератор кодов и образцовый прибор (рис. 2).
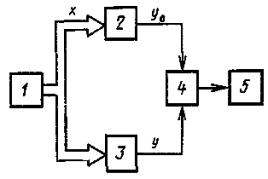
Рис. 1. Схема измерения погрешности:
1 - генератор кодов; 2 - образцовый преобразователь; 3 - поверяемый преобразователь; 4 - дифференциальный усилитель; 5 - АЦП (вольтметр)
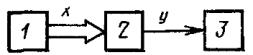
Рис. 2. Схема измерения значений выходного сигнала для последующего вычисления значений погрешности:
1 - генератор кодов; 2 - поверяемый преобразователь; 3 - АЦП (вольтметр)
2. Значение интегральной нелинейности (п. 4.3) может быть определено как методом прямых, так и методом косвенных измерений:
а) по схеме (рис. 3) определяется значение интегральной нелинейности
Δи.н.max = min|(y - y0)max|,
где y, y0 - значения выходных сигналов соответственно поверяемого и образцового преобразователей.
Максимальное по диапазону значение (у - y0) минимизируется путем изменения коэффициента передачи и начального смещения статической характеристики образцового преобразователя;
б) по схеме, представленной на рис. 2, путем прямых измерений значений выходного сигнала поверяемого преобразователя в диапазоне изменения значений входного кода с последующим определением по формуле
![]()
где у' = ycosα - xsinα; у - значение выходного сигнала, соответствующее значению входного кода; α - вспомогательный параметр, перебором значений которого в интервале [-p/2; p/2] минимизируется с требуемой точностью разность |y'max - y'min|.
Рис. 3. Схема определения значения интегральной нелинейности:
1 - генератор кодов; 2 - образцовый преобразователь; 3 - поверяемый преобразователь; 4 - дифференциальный усилитель; 5 - АЦП (вольтметр)
3. Значение дифференциальной нелинейности (п. 4.4) может быть определено путем прямых измерений разности выходных сигналов поверяемого и образцового преобразователей (см. рис. 1) с последующим нахождением значения Δд.н.max по формуле
![]()
где xi - текущее значение кода.
4. Время установления ty (п. 4.5) может быть определено по схеме, представленной на рис. 4, путем измерения интервалов времени от момента смены значений входного кода до момента окончательного вхождения выходного сигнала преобразователя в заданный интервал значений.
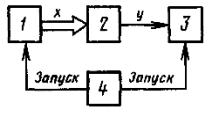
Рис. 4. Схема определения времени установления:
1 - генератор кодов; 2 - поверяемый преобразователь; 3 - АЦП; 4 - формирователь временных интервалов
Рис. 5. Схема определения динамических характеристик:
1 - генератор кодов; 2 - поверяемый преобразователь; 3 - регистрирующее устройство
5. Значения переходного процесса (п. 4.6) могут быть определены по схеме, показанной на рис. 4, путем измерения значений выходного сигнала поверяемого преобразователя в заданные формирователем временных интервалов моменты времени.
6. Допускается определять динамические характеристики с помощью двухкоординатных регистрирующих устройств (рис. 5), например, осциллографа.
7. Соотношение погрешностей образцовых и поверяемых преобразователей должно соответствовать требованиям, изложенным в действующей нормативно-технической документации на методы и средства поверки.
ПРИЛОЖЕНИЕ 2
Справочное
МЕТОДЫ
ОПРЕДЕЛЕНИЯ ПОВЕРЯЕМЫХ ТОЧЕК ШКАЛЫ ПРЕОБРАЗОВАТЕЛЕЙ КОДА В НАПРЯЖЕНИЕ И ТОК ПРИ
РАЗЛИЧНЫХ СПОСОБАХ НОРМИРОВАНИЯ ДОПУСКАЕМОГО ЗНАЧЕНИЯ ПОГРЕШНОСТИ
1. ТЕРМИНЫ И ОПРЕДЕЛЕНИЯ
1.1. Порядок кода - число, равное количеству единиц в его записи.
1.2. Элементарные коды - коды наиболее низкого порядка, из которых путем их объединения могут быть получены любые допускаемые коды.
1.3. m-й шаг - совокупность операций по выявлению кода-доминанты m-го порядка.
1.4. Код-доминанта - код, для которого на данном шаге погрешность оказалась наибольшей.
1.5. Коды-претенденты m-го шага - группа кодов, из числа которых на т-м шаге определяется код-доминанта m-го порядка.
2. МЕТОД ОПРЕДЕЛЕНИЯ ПОВЕРЯЕМЫХ ТОЧЕК ШКАЛЫ ПРЕОБРАЗОВАТЕЛЕЙ, ИСПОЛЬЗУЮЩИХ ПРИНЦИП ВЕСОВОГО СУММИРОВАНИЯ (ДЕЛЕНИЯ) ТОКОВ (НАПРЯЖЕНИЙ) ПРИ НОРМИРОВАНИИ ДОПУСКАЕМОЙ ПОГРЕШНОСТИ ОДНОЧЛЕННОЙ ФОРМУЛОЙ
2.1. Если количество точек шкалы преобразователя s ≥ 2n - 1, где п - количество разрядов входного кода, то поиск экстремальных значений погрешности и соответствующих им кодов может быть осуществлен как многошаговый процесс, на каждом из шагов которого необходимо выполнить следующие операции*.
* После выполнения первого шага и определения двух кодов-доминант (для положительных и отрицательных значений погрешности) поиск разветвляется: сначала определяется экстремальное значение Погрешности одного знака, а затем другого.
2.1.1. Определить коды-претенденты путем объединения кода-доминанты m-го шага со всеми элементарными кодами, не вошедшими в код-доминанту (т - 1)-го шага (например, код-доминанта - 010010, элементарный код - 000100, результат объединения - 010110).
2.1.2. Измерить значения погрешности, соответствующие кодам-претендентам данного шага.
2.1.3. Сравнивая результаты измерений, выделить код-доминанту данного шага.
2.1.4. Сравнить значение погрешности, соответствующее коду-доминанте текущего шага с соответствующим значением, полученным на предыдущем шаге.
2.1.5. Перейти к следующему шагу, если получен результат больший, чем на предыдущем шаге, или прекратить поиск, если он меньше. В последнем случае результат предпоследнего шага есть искомый экстремум.
2.2. Если количество точек шкалы преобразователя s < 2n - 1, т.е. не все кодовые комбинации могут быть реализованы (например, преобразователи тетра-десятичной структуры для цифровых вольтметров или функциональные преобразователи), то описанная в п. 2.1 методика дополняется следующими правилами.
2.2.1. Для получения результата (п. 2.1.5) порядок кода-доминанты, выделяемого на текущем шаге, должен совпадать с номером этого шага.
2.2.2. Найденное в соответствии с п. 2.1.5 значение погрешности будет искомым, если среди кодов-претендентов всех выполненных шагов нет ни одного, который по порядку и соответствующей ему погрешности превосходит найденный.
2.2.3. Если среди кодов-претендентов выполненных шагов есть хотя бы один, который превосходит по порядку и соответствующей ему погрешности выделенный по п. 2.1.5 код, то поиск необходимо продолжить в описанном выше порядке, приняв кодом-доминантой предыдущего шага код с наибольшей погрешностью и используя множество не вошедших в него элементарных кодов (перескок кода-доминанты).
3. МЕТОД ОПРЕДЕЛЕНИЯ ПОВЕРЯЕМЫХ ТОЧЕК ШКАЛЫ ПРЕОБРАЗОВАТЕЛЕЙ, ИСПОЛЬЗУЮЩИХ ПРИНЦИПЫ ВЕСОВОГО СУММИРОВАНИЯ (ДЕЛЕНИЯ) ТОКОВ (НАПРЯЖЕНИЙ) ПРИ НОРМИРОВАНИИ ПРЕДЕЛЬНОЙ ДОПУСКАЕМОЙ ПОГРЕШНОСТИ ДВУЧЛЕННОЙ ФОРМУЛОЙ
3.1. Определить по методике, описанной в п. 2. предельное значение погрешности одного знака и соответствующий ему код. Если выполняется неравенство Δmin(N*1) < Δmin, где Δmin - минимум допускаемого значения абсолютной погрешности, то преобразователь признается годным*.

Если выполняется неравенство Δи(N*1) > Δ(N*1), то преобразователь бракуется.
Если оказывается, что Δmin < Δи(N*1) > Δ(N*1), то для установления пригодности преобразователя необходим дополнительный анализ.
3.2. Построить график, как показано на рисунке. Навести на него точку
Δи(N*1), провести через
нее прямую, параллельную абсциссе, до
пересечения с границей допускаемой погрешности в некоторой точке,
соответствующей коду ![]() Для всех точек шкалы,
лежащих правее
Для всех точек шкалы,
лежащих правее ![]() (точки
(точки ![]() , где τ(N) числовая характеристика кода,
удовлетворяется неравенство Δи(N) < Δ(N), где Δи(N) - измеренное значение погрешности в точке N, преобразователь годен.
, где τ(N) числовая характеристика кода,
удовлетворяется неравенство Δи(N) < Δ(N), где Δи(N) - измеренное значение погрешности в точке N, преобразователь годен.
* Аналогично рассматривают погрешности противоположного знака.
3.3. Провести для точек шкалы ![]() дополнительный поиск экстремума
погрешности в соответствии с методикой, описанной в п. 2 приложения 2. При этом могут быть использованы результаты
измерений, полученные в п. 3.1. Значение Δи(N*2) наносят на график,
показанный на рисунке, и проверяют пригодность преобразователя аналогично
методике, описанной в п. 3.1.
дополнительный поиск экстремума
погрешности в соответствии с методикой, описанной в п. 2 приложения 2. При этом могут быть использованы результаты
измерений, полученные в п. 3.1. Значение Δи(N*2) наносят на график,
показанный на рисунке, и проверяют пригодность преобразователя аналогично
методике, описанной в п. 3.1.
3.4. Описанные операции проводят до получения окончательного заключения о пригодности к эксплуатации данного экземпляра преобразователя.
ПРИЛОЖЕНИЕ 3
Справочное
ОПРЕДЕЛЕНИЕ НЕКОТОРЫХ ТЕРМИНОВ
1. Время установления - интервал времени от момента скачкообразного изменения значения входного кода t0 до момента, начиная с которого значение выходного сигнала преобразователя отличается от установившегося не более чем на предел допускаемого значения статической погрешности.
2. Интегральная нелинейность - максимальное отклонение значений реальной статической характеристики преобразователя от прямой, линеаризирующей данную характеристику по выбранному критерию, при одинаковых значениях входного кода.
3. Дифференциальная нелинейность - отклонение приращения выходного сигнала при последовательной смене значений входного кода от номинального значения единицы младшего разряда.
СОДЕРЖАНИЕ