 | Информационная система | |
|
Утверждено Минсвязи России |
ИНСТРУКЦИЯ
по метрологическому
обеспечению первичных
эталонных генераторов (ПЭГ)
системы сетевой тактовой
синхронизации (ТСС)
Москва 2000 г.
ПЕРЕЧЕНЬ СОКРАЩЕНИЙ
|
ВЗГ |
Вторичный (ведомый) задающий генератор |
|
ВСС |
Взаимоувязанная сеть связи |
|
ГЛОНАСС |
Глобальная навигационная спутниковая система (Россия) |
|
ДВИ (TDEV) |
Девиация временного интервала (Time Deviation) |
|
КТО |
Корректирующее техническое обслуживание |
|
МО |
Метрологическое обеспечение |
|
МОВИ (MTIE) |
Максимальная ошибка (погрешность) временного интервала (Maximum Time Interval Error) |
|
МСЭ-Т (ITU-T) |
Международный Союз Электросвязи, сектор стандартизации телекоммуникаций (International Telecommunication Union -Telecommunication Standardization Sector) |
|
ОВИ (TIE) |
Ошибка временного интервала (Time Interval Error) |
|
ОТЭ |
Объект технической эксплуатации |
|
ПЦИ (PDH) |
Плезиохронная цифровая иерархия (Plesiochronous digital hierarchy) |
|
ПЭВМ |
Персональная электронная вычислительная машина (персональный компьютер) |
|
ПЭГ (PRC) |
Первичный эталонный генератор (Primary Reference Clock) |
|
ПТО |
Профилактическое техническое обслуживание |
|
ПТЭ |
Правила технической эксплуатации |
|
РВР |
Ремонтно-восстановительные работы |
|
РНР |
Ремонтно-настроечные работы |
|
РТМ |
Руководящий технический материал |
|
СВЧ |
Сверхвысокая частота |
|
СЦИ (SDH) |
Синхронная цифровая иерархия (Synchronous digital hierarchy) |
|
СИ |
Средство измерений |
|
СИЭ |
Средство измерений электросвязи |
|
ТИ1 (UI) |
Тактовый (единичный) интервал (Unit Interval) |
|
ТСС |
Тактовая сетевая синхронизация |
|
УТО |
Управляемое техническое обслуживание |
|
ЦПУ |
Цифропечатающее устройство |
|
BIPM |
Международное бюро мер и весов (Bureau International des Poids et Mesures) |
|
ETS |
Европейский стандарт электросвязи (European Telecommunication Standard) |
|
IERS |
Международная служба земного вращения (International Earth Rotation Service) |
|
GPS |
Global Positioning System - глобальная навигационная система (США) |
___________
1 Данное обозначение используется в ГОСТ 22670 [1], ГОСТ 26886-86 [2], ГОСТ 27763-88 [3], ОСТ 45.90-96 [4] и др., однако в ряде нормативных документов отрасли и переводах международных рекомендаций и стандартов применяется термин "единичный интервал" (ЕИ).
ТЕРМИНЫ И ОПРЕДЕЛЕНИЯ
Всемирное (универсальное) координированное время
Шкала времени, поддерживаемая Международным бюро мер и весов (BIPM) и Международной службой земного вращения (IERS), которые формируют основу для координированного распространения стандартных частот и сигнала времени. (G.810 [5])
Вторичный задающий генератор (ВЗГ)
Задающий генератор, выходной сигнал которого подстраивается по эталонному сигналу тактовой синхронизации, получаемому от задающего генератора более высокого качества. (G.810 [5])
ПРИМЕЧАНИЕ: В Рекомендации G.810 задающий генератор с указанными свойствами называется "ведомым" ("slave"), но здесь приводится термин, используемый в отечественной технической документации.
Девиация временного интервала (ДВИ)
Измеренное значение ожидаемого изменения времени сигнала как функция времени интеграции. ДВИ (TDEV) дает информацию о спектральных составляющих фазового (или временного) шума сигнала. ДВИ выражается в единицах времени. ДВИ определяется расчетным образом на основе последовательности отсчетов ошибок временного интервала (ОВИ):
 ,
,
n = 1, 2, …, целая часть от ![]()
|
где xj |
отсчеты значений ОВИ; |
|
|
N_ |
суммарное число отсчетов; |
|
|
t0 |
интервал дискретизации для ОВИ; |
|
|
t |
время интеграции, независимая переменная для девиации времени (TDEV); |
|
|
n |
число интервалов дискретизации при n = 1, 2, ... , в пределах времени интеграции t. |
|
При этом время интеграции t равно nt0. (G.810 [5])
Дрейф2 фазы
Долговременные изменения значащих моментов цифрового сигнала относительно их эталонных положений во времени (где под понятием "долговременные" подразумевается, что эти изменения имеют частоту менее 10 Гц).
Данное понятие не включает дрейф фазы, вызванный сдвигом и дрейфом частоты. (G.810 [5], O.172 [6])
____________
2 Одним из используемых вариантов перевода термина "Wander" является выражение "блуждание фазы", однако в данном документе применяется термин "дрейф фазы", принятый в отраслевых нормативных документах.
Фазовое дрожание3
Кратковременные изменения значащих моментов сигнала тактовой синхронизации относительно их идеальных положений во времени (где под понятием "кратковременные" подразумевается, что эти изменения имеют частоту больше или равную 10 Гц).(G.810 [4], O.172 [6])
___________
3 Часто используемым эквивалентным термином является слово "джиггер", однако приведенный термин соответствует отраслевым нормативным документам.
Задающий генератор
Устройство, которое обеспечивает получение сигнала тактовой синхронизации. (G.810 [5])
Измерительный опорный тактовый сигнал
Сигнал тактовой синхронизации с заданными качественными показателями, используемый в качестве временной основы для измерения характеристик задающего генератора. Основным условием является то, что его качественные показатели должны быть значительно лучше по измеряемому параметру, чем у задающего генератора, подлежащего испытанию, для того чтобы предотвратить искажение результатов измерения. Параметры качественных показателей стандарта частоты должны быть указаны для всех результатов измерений. (G.810 [5])
Корректирующее техническое обслуживание (КТО)
Техническое обслуживание, выполняемое после обнаружения состояния неработоспособности объектов технического обслуживания (ОТЭ) и направленное на его восстановление в состояние, когда параметры качества ОТЭ находятся в пределах установленных допусков. (ПТЭ [7])
Максимальная ошибка временного интервала (МОВИ)
Максимальное значение размаха изменения задержки данного сигнала тактовой синхронизации по отношению к идеальному сигналу тактовой синхронизации в течение времени наблюдения (t = nt0) для всех значений времени наблюдения, длительность которых находится в пределах периода измерения (T). МОВИ (MTIE) оценивается при помощи следующей формулы (G.810 [5]):
![]() , где n
= 1, 2, …N-1
, где n
= 1, 2, …N-1
Метрологическое обеспечение (МО) отрасли "Связь"
Установление и применение научных и организационных основ, технических средств, правил и норм, необходимых для достижения единства и требуемой точности измерений с целью обеспечения высокого качества услуг связи, предоставляемых потребителям, повышения производительности труда при технической эксплуатации средств связи. (ОСТ 45.92-96 [8])
Нарушение непрерывности (непостоянство) фазы
Нарушения фазы ограниченной длительности. (G.810 [5]), допускаемые за счет операций внутри задающего генератора. (G.811 [9])
Отклонение частоты
Долговременный сдвиг (отклонение) частоты сигнала тактовой синхронизации относительно идеальной частоты. (G.810 [5])
Относительное отклонение частоты
Отношение разности между действительной частотой сигнала и заданной номинальной частотой к номинальной частоте. (G.810 [5])4 Относительное отклонение частоты вычисляется по формуле:
![]() ,
,
где fд - действительное значение частоты;
fн - номинальное значение частоты.
___________
4 Данному понятию в отечественных нормативных документах (ГОСТ 15855-77 [10], МИ 2188-92 [22]) соответствует термин "Относительная погрешность по частоте". Термину "Относительное отклонение частоты" соответствует другое понятие: отношение разности между результатом наблюдений значения частоты и средним арифметическим значением ряда наблюдений к номинальному значению частоты. В данном документе используется термин и соответствующее ему понятие, принятые в международных стандартах по электросвязи, где даются нормы на параметры аппаратуры тактовой синхронизации.
Отрасль "Связь"
Предприятия, объединения и организации, независимо от форм собственности осуществляющее свою деятельность в области передачи информации и предоставления услуг связи потребителям на основании административного подчинения Минсвязи России (теперь Государственный комитет Российской Федерации по телекоммуникациям) или лицензий, полученных от Минсвязи России. (Соглашение о взаимодействии Государственного комитета России по стандартизации, метрологии и сертификации и Министерства связи Российской Федерации по метрологическому обеспечению отрасли "Связь" [11], ОСТ 45.92-96 [8])
Ошибка временного интервала (ОВИ)
Разность между измеренным значением временного интервала, производимого задающим генератором, и измеренным значением того же самого временного интервала, производимого эталонным задающим генератором. Математически функция ошибки временного интервала, ОВИ (TIE), может быть выражена, как:
ОВИ (t; t) = [T (t+t) - T(t)] - [Tref (t+t) - Tref (t)] = x (t+t) - x (t), где
t - интервал времени, называемый интервалом наблюдения. (G.810 [5])
Первичный эталонный (задающий) генератор (ПЭГ)
Стандарт эталонной частоты, который обеспечивает сигнал эталонной частоты согласно требованиям Рекомендации G.811 [9]. (G.810 [5])
Поверка средства измерений
Совокупность операций, выполняемых органами Государственной метрологической службы (другими уполномоченными на то организациями) с целью определения и подтверждения соответствия средства измерений установленным техническим требованиям. (Закон РФ "Об обеспечении единства измерений", ОСТ 45.92-96 [8])
Профилактическое техническое обслуживание (ПТО)
Техническое обслуживание, выполняемое через определенные интервалы времени или в соответствии с заранее установленными критериями и направленное на своевременное предупреждение возможности появления отказа или ухудшения функционирования ОТЭ. (ПТЭ [7]).
Сигнал тактовой синхронизации (синхросигнал)
Номинальный периодический сигнал, генерируемый задающим генератором для управления хронированием операций в цифровом оборудовании и сетях. Из-за неизбежных нарушений, таких как флюктуации фазы генератора, действительные сигналы тактовой синхронизации являются псевдопериодическими, т.е. интервалам времени между последовательными равными фазовыми моментами присущи медленные изменения. (G.810 [5])
Средство измерений (СИ)
Техническое устройство, предназначенное для проведения измерений и имеющее нормированные технические свойства. (Закон РФ "Об обеспечении единства измерений", ОСТ 45.92-96 [8])
Средство измерений электросвязи (СИЭ)
Средство измерений специального назначения, разработанное и (или) применяемое преимущественно в технике связи. (Соглашение о взаимодействии Государственного комитета России по стандартизации, метрологии и сертификации и Министерства связи Российской Федерации по метрологическому обеспечению отрасли "Связь" [11])
Стабильность частоты
Случайное и/или вызываемое окружающей средой изменение частоты в течение заданного временного интервала. (G.810 [5])
Обычно различают систематические изменения, такие как дрейф частоты (за счет радиации, давления, температуры, влажности, источников питания, заряда, старения и т.д.) и стохастические флюктуации частоты, которые обычно изменяются во времени. Для того, чтобы характеризовать эти флюктуации, предназначены специальные переменные: вариация Аллана, модифицированная вариация Аллана, дисперсия времени) и/или в зависимости от частоты (односторонняя спектральная плотность).
Стандарт частоты
Генератор, выходной сигнал которого используется как сигнал эталонной частоты. (G.810 [5])
Тактовый интервал (ТИ) цифрового сигнала электросвязи
Интервал времени между соседними тактовыми точками цифрового сигнала электросвязи5. (ГОСТ 22670-77 [1])
___________
5 См. сноску 1 на стр. III.
Управляемое техническое обслуживание (УТО)
Техническое обслуживание, выполняемое путем систематического применения методов анализа состояния объектов технической эксплуатации (ОТЭ) с использованием средств контроля рабочих характеристик ОТЭ, средств управления качеством передачи и устранением неисправностей, и направленное на сведение к минимуму профилактического технического обслуживания и сокращение корректирующего технического обслуживания. (ПТЭ [7])
Инструкция
по метрологическому обеспечению
первичных эталонных генераторов (ПЭГ)
системы сетевой тактовой синхронизации (ТСС)
Введение
Создание и развитие системы сетевой тактовой синхронизации (ТСС) имеет важнейшее значение при организации и совершенствовании цифровых сетей общего пользования. Главнейшим звеном этой системы являются первичные эталонные генераторы (ПЭГ), устанавливаемые согласно РТМ [12] по построению ТСС в регионах синхронизации. На первом этапе развития системы ТСС предусматривается 5 регионов синхронизации, в каждом из которых на объекте ОАО "Ростелеком" устанавливается один или два ПЭГ'а. По синхросигналам, получаемым от ПЭГ непосредственно или через промежуточные пункты, синхронизируются все сетевые узлы и станции данного региона, входящие в цифровую сеть.
Для полноценного взаимодействия в псевдосинхронном режиме с соседними регионами и с международной цифровой сетью ПЭГ каждого региона должен удовлетворять требованиям международных рекомендаций и стандартов, а именно Рекомендации МСЭ-Т G.811 [9] и стандарта ETS 300 462-6 [13], а также в части сетевых норм на дрожание и дрейф фазы - стандарта ETS 300 462-3 [14]. Текст Рекомендации МСЭ-Т G.811 [9], а также выдержки из стандарта ETS 300 462-3 [14] в части ПЭГ, приводятся в приложении А. ВЗГ, входящие в состав ПЭГ'ов, должны удовлетворять требованиям Рекомендации МСЭ-Т G.812 [15], но их параметры не подлежат эксплуатационному контролю при проверке ПЭГ, как и другие его составные блоки.
Метрологическое обеспечение (МО) ПЭГ имеет важное значение при вводе их в эксплуатацию и поддержании в состоянии, соответствующем требованиям норм, приведенных в указанных документах. Основные рекомендации МО для ТСС на цифровой сети общего пользования содержатся в [16]. Однако для практического использования этих рекомендаций на сети ОАО "Ростелеком" для МО ПЭГ требуется их конкретизация с учетом современного состояния технических средств.
В настоящем документе приводятся основные принципы метрологического обеспечения ПЭГ, порядок организации и методы контроля (проверки) нормируемых параметров ПЭГ, рекомендуемые средства измерений. Во вводной части приводятся перечни сокращений и терминов, используемых в настоящей инструкции, с указанием источников (отечественных нормативных документов, международных рекомендаций и стандартов).
1 ОСНОВНЫЕ ПРИНЦИПЫ МЕТРОЛОГИЧЕСКОГО ОБЕСПЕЧЕНИЯ (МО) ПЭГ
1.1 Виды функций технической эксплуатации и
задачи метрологического
обеспечения ПЭГ
1.1.1 В соответствии с книгой 2 Правил технической эксплуатации первичных сетей ВСС [7] техническая эксплуатация осуществляется при:
• вводе в эксплуатацию (паспортизации);
• техническом обслуживании в процессе эксплуатации;
• восстановлении работоспособности (ремонтно-настроечных и ремонтно-восстановительных работах).
1.1.2 Эксплуатационный контроль ПЭГ обеспечивает выполнение функций технической эксплуатации, его можно отнести [7] к управляемому техническому обслуживанию (УТО), содержащему элементы профилактического (ПТО) и корректирующего технического обслуживания (КТО), т.е. включает:
• непрерывный эксплуатационный контроль;
• оперативно-технический контроль;
• операции управления и переключения на резерв;
• периодический эксплуатационный контроль;
• эпизодический эксплуатационный контроль;
• ремонтно-восстановительные и ремонтно-настроечные работы (РВР и РНР).
1.1.3 Первые три вида контроля обеспечиваются встроенными в аппаратуру ПЭГ средствами и не требуют специального метрологического обеспечения. В соответствии со своими должностными обязанностями эксплуатационный персонал должен постоянно следить за стоечной и станционной сигнализацией аппаратуры, а также за информацией, выдаваемой системами управления оборудования ПЭГ или сети ТСС при их наличии в составе оборудования.
Метрологическое обеспечение требуется для операций периодического и эпизодического эксплуатационного контроля и измерений, выполняемых при РВР и РНР.
1.1.4 Периодический эксплуатационный контроль параметров ПЭГ заключается в периодическом их измерении 1 раз в год.
1.1.5 Эпизодический эксплуатационный контроль параметров ПЭГ также заключается в их измерении и проводится при выявлении неустойчивой работы ПЭГ (частое переключения на резерв и другие сообщения встроенной системы контроля) по результатам непрерывного контроля или жалобам со стороны потребителей синхросигналов, а также после проведения РВР и РНР.
1.1.6 При необходимости, когда нормы оказываются превышенными, проводятся ремонтно-восстановительные работы (РВР), заключающиеся для этого вида аппаратуры в замене блока или платы. РНР для ПЭГ, практически, не проводятся, так как в ней не предусмотрена возможность регулировок нормируемых параметров. После проведения ремонта (замены плат, влияющих на нормируемые параметры) проводятся измерения нормируемых параметров ПЭГ.
1.1.7 Задачи метрологического обеспечения при эксплуатационном контроле параметров ПЭГ, состоят в следующем (см. также раздел 1.2):
• использование средств измерений, обеспечивающих функции измерения необходимых параметров синхросигналов на выходе ПЭГ с требуемой точностью, и прошедших испытания типа по правилам метрологии ПР 50.2.009-94 [17], т.е. включенных в Госреестр, и сертификационные испытания в Госкомсвязи России согласно статье 16 Закона Российской Федерации "О связи";
• обеспечение метрологического контроля за используемыми средствами измерений (своевременное представление на поверку, в случае необходимости представление на испытания типа);
• проведение измерений по аттестованным (согласованным с Главным метрологом отрасли "Связь") методикам измерений квалифицированным персоналом.
1.1.8 Для практического выполнения поставленных задач на сети ОАО "Ростелеком" требуется:
• оснащение филиалов ОАО "Ростелеком", имеющих в составе оборудования ПЭГ, необходимыми средствами измерений (см. далее раздел 3);
• организация (в случае приобретения несертифицированных средств измерений) испытаний типа в Госстандарте России и сертификационных испытаний в отрасли "Связь", в том числе на конкретные экземпляры СИ данного типа (см. п. 1.2);
• организация поверки используемых средств измерений (см. п. 1.2);
• организация обучения персонала, проводящего измерения параметров ПЭГ, использованию современных методик выполнения измерений и современных средств измерений, соответствующих аттестованным методикам измерений нормируемых параметров ПЭГ.
1.2 Правовые вопросы организации МО ПЭГ
1.2.1 Процедуры проверки параметров ПЭГ при наличии соответствующих средств измерений выполняются при эксплуатационном контроле силами эксплутационного персонала филиалов ОАО "Ростелеком", в составе оборудования которых находится данный ПЭГ, а также во время работы комиссий по приемке оборудования специалистами по назначению.
1.2.2 Процедура сличения частоты (см. ниже п. 1.3.4) относится к этим процедурам. Измерения должны проводиться по методике испытаний, приведенной в настоящем документе (см. п. 2.2). Привлечение работников Госстандарта России необходимо только при отсутствии соответствующих средств измерений. В последнем случае с органами Госстандарта России или другими организациями заключаются договора на аренду стандарта частоты и времени или на проведение измерений с целью сличения частоты. В задачу эксплуатационного персонала с привлечением метролога предприятия связи в этом случае входит проверка того, что применяемые СИ поверены (см. ниже п.п. 1.2.3, 1.2.5).
1.2.3 При организации эксплуатационного контроля ПЭГ следует иметь в виду, что измерения параметров ПЭГ относятся к сфере распространения государственного метрологического контроля и надзора, поэтому используемые средства измерений (СИ) подлежат поверке на основании РД 45.002-97 "Руководство по установлению номенклатуры средств измерений, подлежащих поверке" [18]. Из этого следует, что они должны иметь сертификат об утверждении типа средств измерений, выдаваемый Госстандартом России по результатам испытаний, проводимым согласно правилам по метрологии ПР 50.2.009-94 "Порядок проведения испытаний и утверждения типа средств измерений" [17] и подвергаться поверке в соответствии с ПР 50.2.006-94 [19].
Согласно ПР 50.2.009-94 испытания типа проводятся как целиком на данный тип СИ (обычно по заявке производителя или дилера), так и на конкретные экземпляры или партию СИ данного типа. Последние могут проводиться по заявке оператора связи уже после приобретения СИ или заявке дилера, поставляющего аппаратуру для конкретного проекта.
1.2.4 Кроме того, применяемые СИ, если они специально предназначены для измерений параметров сигналов и аппаратуры электросвязи, как и все используемые на сетях ВСС средства измерений электросвязи (СИЭ), должны иметь сертификат соответствия, выдаваемый Государственным комитетом Российской Федерации по телекоммуникациям (ранее - Госкомсвязи России) по результатам сертификационных испытаний в системе сертификации "Электросвязь", что определено Законом Российской Федерации "О связи" (статья 16). Этот сертификат не требуется для СИ общего применения, т.е. СИ, не предназначенных специально для измерений в связи (стандартов частоты и времени, осциллографов без масок сигналов электросвязи, частотомеров, миллиампервольтметров и т.п.), но рекомендуемых в утвержденных методиках измерений параметров каналов и аппаратуры электросвязи.
Наличие сертификата Государственного комитета Российской Федерации по телекоммуникациям для СИЭ необходимо, так как он гарантирует соответствие требованиям, предъявляемым к данному типу СИЭ, для использования в ВСС, а сертификат Госстандарта России обеспечивает только соответствие метрологических характеристик СИ данного типа характеристикам, заявленным фирмой-изготовителем.
1.2.5 Поверка собственных СИ, используемых для измерений параметров ПЭГ, должна проводиться метрологическими службами филиалов ОАО "Ростелеком", если они имеют соответствующие рабочие эталоны, а данные СИ входят в область аккредитации этих метрологических служб, т.е. содержатся в приложении к Аттестату аккредитации на право поверки метрологической службы данного Филиала ОАО "Ростелеком", полученному в соответствии с Правилами по метрологии Госстандарта России ПР 50.2.014-96 [20].
В противном случае, т.е. если метрологическая служба филиала ОАО "Ростелеком" не может проводить поверку этих СИ, ее следует проводить по договору с другой аккредитованной метрологической службой (в том числе с органами Госстандарта России), имеющей возможности и право на это.
1.3 Нормируемые и подлежащие МО параметры ПЭГ
1.3.1 Основные характеристики ПЭГ, нормы на которые задаются для обеспечения тактовой синхронизации в цифровых сетях, приводятся в [9, 13 и 14]. К ним относятся параметры точности и стабильности, частоты, параметры дрожания и дрейфа фазы синхросигналов на выходах ПЭГ, а также параметры импульсов:
• точность установки и поддержания номинала тактовой частоты синхросигналов;
• максимальная ошибка временного интервала относительно Всемирного координированного времени (МОВИ);
• девиация временного интервала (ДВИ);
• фазовое дрожание сигналов синхронизации;
• нарушения непрерывности (непостоянство) фазы сигналов синхронизации из-за операций внутри задающего генератора;
• параметры импульсов (форма и амплитуда) сигналов синхронизации.
1.3.2 Эти параметры подлежат проверке на различных стадиях существования системы ТСС на сети ОАО "Ростелеком" при выполнении различных функций технической эксплуатации: при вводе в эксплуатацию ПЭГ и эксплуатационном контроле: техническом обслуживании в процессе эксплуатации и ремонте (см. п. 1.1).
1.3.3 Нормируемые характеристики аппаратуры синхронизации ПЭГ приведены в таблице 1. Нормы, указанные в таблице, соответствуют Рекомендации G.811 [9] и стандарту ETS 300 462-6 [13]. Для МОВИ и ДВИ указаны также сетевые нормы из стандарта ETS 300 462-3 [14], которые для этих параметров отличаются от норм по Рекомендации G.811 практически только в области больших значений времени измерения (>30000 с). Общие рекомендации по их измерению при выполнении отдельных функций технической эксплуатации с точки зрения метрологического обеспечения приведены ниже в данном разделе, а методы и средства измерений рассматриваются в разделах 2 и 3 соответственно.
Таблица 1 - Характеристики первичного эталонного генератора (ПЭГ)
|
Параметр |
Норма |
Источник, раздел |
Примечание |
|
|
Значение |
Условие |
|||
|
Относительное отклонение частоты |
£ 1×10-11f |
За время > 7 суток |
MCЭ-T G.811(02/97), 7 |
|
|
ETS 300 462-6, 4 |
||||
|
Максимальная ошибка временногоинтервала МОВИ (MTIE) |
0,275×10-3 t + 0,025мкс |
0,1 < t £ 1000 с |
MCЭ-T G.811 (02/97), 6.1 |
t - период наблюдения в секундах |
|
10-5 t + 0,29 мкс |
t > 1000 с, |
ETS 300 462-6, 5.1 |
||
|
25 нс |
0,1 < t £ 83 с |
ETS 300 462-3, 7.2.1 |
||
|
0,3t нс |
83 < t £ 1000 с |
|||
|
300 нс |
1000 < t £ 30000 с |
|||
|
0,01t нс |
t > 30000 с |
|||
|
Девиация временного интервала ДВИ (TDEV) |
3 нс |
0,1 < t £ 100 с |
MCЭ-T G.811 (02/97), 6.1 |
t - период наблюдения в секундах |
|
0,03t нс |
100 < t £ 1000 с |
ETS 300 462-6, 5.1 |
||
|
30 нс |
1000 < t £ 10000 с |
|||
|
3 нс |
0,1 < t £ 100 с |
ETS 300 462-3, 7.2.1 |
||
|
0,03t нс |
100 < t £ 1000 |
|||
|
29,7 + 0,0003t нс |
1000 <t £ 1000000 |
|||
|
Нарушение неравномерности фазы |
скачки фазы синхросигнала |
При переключении эталонных источников ПЭГ |
MCЭ-T G.811(02/97), 7 |
|
|
ETS 300 462-6, 6 |
||||
|
Фазовое дрожание |
£ 0,05 ТИ |
от 20 Гц до 100 кГц в течение 60 с |
MCЭ-T G.811, (02/97), 6.2 |
|
|
ETS 300 462-6, 5.2 |
||||
|
Форма и амплитуда выходных синхросигналов |
Соответствие маскам |
На выходных портах с симметричной нагрузкой |
ГОСТ 26886, 4 и 8 |
|
|
MCЭ-T G.703, 6.2 и 10.2 |
||||
1.3.4 Тактовая частота синхросигналов на выходах ПЭГ
1.3.4.1 Основным параметром, подлежащим эксплуатационному контролю при техническом обслуживании ПЭГ и требующим специального метрологического обеспечения, является долговременное отклонение частоты (относительное отклонение частоты за время более 7 суток) синхросигналов на выходах ПЭГ, которое включает погрешность установки и стабильность частоты [5]. Контроль этого параметра частично обеспечивается принципом построения ПЭГ (основанном на переключении на резервный источник частоты при превышении установленного порога по отклонению частоты и параметрам дрейфа фазы сигнала на выходе ПЭГ), а также встроенными в аппаратуру ПЭГ средствами контроля, обеспечивающими соответствующую сигнализацию и регистрацию событий в ходе функционирования ПЭГ.
Тем не менее, как при вводе в эксплуатацию, так и периодически в процессе эксплуатации необходима проверка относительного отклонения частоты синхросигналов на выходах ПЭГ, которая состоит в ее сличении с частотой Государственного эталона частоты. Методы проведения этого сличения описаны ниже в разделе 2.
1.3.4.2 Контроль тактовой частоты синхросигналов на выходах ПЭГ проводится при вводе аппаратуры в эксплуатацию, а также периодически (1 раз в год) и эпизодически при обнаружении тех или иных событий, свидетельствующих о неустойчивой работе ПЭГ. Периодичность контроля подлежит дальнейшему уточнению по результатам, полученным в ходе эксплуатации аппаратуры ПЭГ.
1.3.4.3 Длительность сеанса измерений при контроле тактовой частоты (по методикам, основанным на измерении набега фазы и приведенным в разделе 2) на соответствие норме должна быть не менее 7 суток. При эпизодическом контроле с целью определения неисправности длительность измерений определяется в зависимости от характера неисправности.
1.3.4.4 Контроль тактовой частоты синхросигналов на выходах ПЭГ проводится путем сличения с частотой Государственного эталона частоты, соответствующего Всемирному координированному времени. Методы этого сличения зависят от используемых технических средств, от которых получают сигналы эталонной частоты. Несколько рекомендуемых методов приведено в разделе 2.
1.3.4.5 Основными источниками эталонной частоты, на которые реально можно рассчитывать в настоящее время, можно считать:
а) Перевозимый стандарт частоты и времени - водородный пассивного типа или другой стандарт частоты и времени, обеспечивающий необходимые метрологические характеристики (см. п. 3.1.1);
б) Сигналы времени и сигналы эталонных частот 66,(6) кГц и 50 кГц, излучаемые круглосуточно двумя радиостанциями, расположенными вблизи городов Москва и Иркутск соответственно, при этом радиостанция 66,(6) кГц охватывает и обеспечивает Европейскую часть стран СНГ, а 50 кГц - Азиатскую;
в) Сигналы глобальной спутниковой системы синхронизации и навигации ГЛОНАСС, позволяющие проводить сличение частот практически в любой точке Земного шара (в настоящее время функционирует не полностью), и в качестве резервного источника - сигналы американской спутниковой радионавигационной системы GPS.
1.3.4.6 При применении источника "а" (п. 1.3.4.5), кроме самого генератора и электронно-счетного частотомера, работающего в режиме измерения интервалов времени, необходимы еще дополнительные устройства, обеспечивающие деление измеряемой тактовой частоты синхросигнала до 1 Гц или осуществляющие измерение нестабильности частоты относительно опорного сигнала. Это необходимо потому, что такие стандарты частоты, как правило, не имеют на выходе сигнала частотой 2048 кГц. Подробно схема измерения и аппаратные средства описываются в разделе 2.
1.3.4.7 В качестве аппаратного средства для сличения частоты с помощью радиосигналов частоты и времени ("б", п. 1.3.4.5) достаточно использование одного устройства - опорного генератора (приемника-компаратора с внешней радиоантенной), обеспечивающего сличение частоты и формирование высокостабильных сигналов, синхронизируемых по эталонным сигналам частоты и времени. Разработка такого устройства закончена (см. раздел 3), после его сертификации в Госстандарте и системе сертификации отрасли "Связь" его можно будет использовать как для сличения частоты сигналов на выходе ПЭГ, так и в качестве опорного генератора и рабочего эталона для других применений.
1.3.4.8 В качестве аппаратных средств для сличения частоты по сигналам спутниковых радионавигационных систем ГЛОНАСС/GPS ("в", п. 1.3.4.5) должны использоваться довольно сложные и дорогие устройства, состоящие из СВЧ-антенн, приемных и других устройств. В настоящее время нет законченного устройства, обеспечивающего сличение частоты сигналов на выходе ПЭГ. Поставляемые в составе ПЭГ приемники GPS не могут быть использованы для этой цели, так как предназначены только для использования в качестве резервного источника в составе ПЭГ и не имеют самостоятельного значения. Кроме того, согласно Приказу Госкомсвязи России № 44 от 15.03.99 г. система GPS может использоваться только в качестве резервной.
1.3.4.9 Для практического использования на ближайшее будущее можно рекомендовать использование способа сличения тактовой частоты на выходе ПЭГ с применением первого и второго источника опорной частоты (п.п. 1.3.4.6, 1.3.4.7). Использование второго способа - сличения частоты с помощью радиосигналов частоты и времени более предпочтительно, так как схема измерений при этом является более простой. Методика испытаний для этих способов приведена в разделе 2.
1.3.4.10 Для использования перевозимого стандарта частоты (источника "а" по п. 1.3.4.5) Филиалу ОАО "Ростелеком" следует заключить договор на аренду или проведение измерений с организацией (скорее всего органом Госстандарта России), имеющей необходимые технические средства (в том числе СИ, имеющие свидетельства о поверке), исходя из географической близости к узлу связи, где находится ПЭГ, и экономических соображений.
1.3.4.11 При использовании второго способа (п. 1.3.4.7) измерения могут проводиться также по договору с организацией, имеющей необходимый опорный генератор, синхронизируемый по эталонным радиосигналам частоты и времени. Однако следует отметить, что более целесообразно его приобретение.
1.3.4.12 При появлении на рынке приемников-компараторов сигналов ГЛОНАСС ("в", п. 1.3.4.5), пригодных для сличения тактовой частоты на выходе ПЭГ, они могут быть использованы при соответствующем технико-экономическом обосновании.
1.3.5 Параметры нестабильности фазы синхросигналов на выходах ПЭГ
1.3.5.1 Максимальная ошибка временного интервала (МОВИ) и девиация временного интервала (ДВИ) относятся к параметрам, характеризующим низкочастотный фазовый шум ПЭГ (дрейф фазы или "wander"), и весьма важны для оценки качества синхросигналов на выходах ПЭГ. Эти параметры, должны измеряться предназначенными для этого специализированными средствами измерения, подходящими для поставленной задачи в правовом и метрологическом отношении (см. п. 1.2.1 и раздел 3). При этом важно помнить, что для оценки синхросигналов на выходах ПЭГ на соответствие нормам по этим параметрам в качестве опорной частоты должен подключаться эталонный сигнал, имеющий параметры частоты не хуже, чем требуется для ПЭГ (см. п. 3.2.1.2).
1.3.5.2 Нарушение неравномерности фазы (непостоянство фазы) синхросигналов на выходах ПЭГ проверяется путем измерения величины скачка фазы при переключениях на резервный источник в аппаратуре ПЭГ. Измерение проводится приборами, указанными в предыдущем пункте (см. также п. 1.2.1 и раздел 3).
1.3.5.3 Еще одним параметром, характеризующим состояние фазы синхросигналов, является фазовое дрожание ("jitter"). Эти измерения должны также проводиться с помощью средств измерения электросвязи, позволяющих измерять нормируемые для сигналов синхронизации значения фазового дрожания (см. п. 1.2.1 и раздел 3). Следует иметь в виду, что отечественные и зарубежные анализаторы цифровых сигналов, имеющие режим измерения фазового дрожания, не всегда рассчитаны на измерение низких значений параметров фазового дрожания, нормируемых для синхросигналов.
1.3.5.4 Контроль параметров дрейфа (МОВИ, ДВИ скачков фазы при переключениях в аппаратуре) и дрожания фазы синхросигналов на выходах ПЭГ должен проводиться при вводе аппаратуры в эксплуатацию и периодически (1 раз в год), а также эпизодически при обнаружении тех или иных событий, свидетельствующих о неустойчивой работе системы ТСС.
1.3.5.5 Методы и средства измерения этих параметров рассматриваются в разделах 2 и 3 настоящего документа.
1.3.6 Параметры импульсов синхросигналов
1.3.6.1 Проверка параметров импульсов (форма и амплитуда) периодических сигналов синхронизации с частотой 2048 кГц и со скоростью 2048 кбит/с (в коде HDB-3) может выполняться с помощью широко распространенных отечественных осциллографов, удовлетворяющих определенным требованиям по частоте и погрешности измерения (см. раздел 3), путем сравнения параметров импульса по горизонтали и вертикали с внешним шаблоном, соответствующим норме. Возможно применение современных осциллографов или анализаторов сигналов связи (зарубежных фирм), в программы которых заложены стандартизованные шаблоны (маски) в соответствии с Рекомендацией МСЭ-Т G.703 [21]. Последние выводятся на экран одновременно с измеряемым сигналом, но следует иметь в виду, что эти приборы, относящиеся к категории СИЭ, предварительно подлежат обязательной сертификации (см. п. 1.2 и раздел 3).
1.3.6.2 Контроль параметров импульсов синхросигналов на выходах ПЭГ должен проводиться предназначенными для этого средствами измерения при вводе аппаратуры в эксплуатацию и периодически (1 раз в год) одновременно с проверкой других параметров (п.п. 1.3.4 и 1.3.5), а также эпизодически при обнаружении тех или иных событий, свидетельствующих о неустойчивой работе системы ТСС.
1.3.6.3 Методы и средства измерения этих параметров рассматриваются в разделах 2 и 3 настоящего документа.
2 МЕТОДЫ ИЗМЕРЕНИЙ
В данном разделе приводится описание методов измерений указанных выше параметров ПЭГ для типовых СИ. Рекомендуемые СИ и требования к ним приводятся в разделе 3.
2.1 Подготовка к работе
2.1.1 Перед началом измерений должны быть подготовлены необходимые средства измерений, проверена их комплектность и отсутствие внешних механических повреждений. До включения приборов следует ознакомиться с руководством по эксплуатации каждого прибора, участвующего в измерении, изучить расположение и назначение органов управления и разъемов на передней и задней панели приборов.
2.1.2 Заблаговременно на рабочем месте (в помещении, где расположен ПЭГ) должна быть собрана и проверена схема измерений, которая должна включать, при необходимости, регистрирующие устройства.
Приборы должны размещаться так, чтобы при эксплуатации вентиляционные отверстия не закрывались посторонними предметами.
С целью соблюдения мер безопасности применяемые технические средства должны подключаться к сети с помощью трехполюсной вилки, а если она не предусмотрена в конкретных устройствах, должно быть обеспечено подключение к защитному заземлению.
2.1.3 Перед началом проведения измерений приборы включаются заранее с учетом времени установления рабочего режима, указанного в руководстве по эксплуатации.
2.2 Тактовая частота синхросигналов
2.2.1 Способ сличения тактовой частоты на выходах ПЭГ с помощью перевозимого стандарта частоты и времени
Сличение выполняется по схемам рисунков 1 или 2.
2.2.1.1 Сравнение частот фазово-временным методом [22] по схеме рисунка 1 осуществляется следующим образом: сигнал импульсной формы от перевозимого стандарта частоты и времени (источник "а" п. 1.3.4.5) с частотой 1 Гц подается на один вход электронно-счетного частотомера, работающего в режиме измерения интервалов времени. Формируемый с помощью специального делителя частоты из подлежащего измерению сигнала 2,048 МГц (выход 2,048 Мбит/с не может применяться для сличения частоты по этому методу без дополнительного устройства выделения тактовой частоты) с дополнительного выхода ПЭГ сигнал импульсной формы с частотой 1 Гц подается на другой вход частотомера. Названия входов зависят от типа частотомера. В качестве опорной частоты для частотомера используют вместо встроенного кварцевого генератора внешний сигнал (5 МГц) с выхода стандарта частоты и времени. Измеряют интервалы времени между сигналами частотой 1 Гц - Ti и подсчитывают относительную разность частот за интервал времени tи между i-м и (i+l)-м результатами измерений:
![]() (2.1)
(2.1)
Значение интервала времени устанавливается в зависимости от общей длительности измерения и необходимости одновременного контроля скачков фазы и типа ЦПУ. Для периода измерения 1 сутки tи устанавливается от 1 минуты до 1 часа, для периода 7 суток от 15 минут до 3 часов.
Значение относительного отклонения частоты синхросигнала на выходе ПЭГ от стандарта частоты (т.е. номинального значения) за время измерения6 определяется на основании значений, полученных для интервалов времени tи из формулы (2.1), и рассчитывается по формуле:
![]() (2.2)
(2.2)
ПРИМЕЧАНИЕ: Данный параметр характеризует отклонение действительного значения частоты синхросигнала на выходе ПЭГ за период измерений, а нестабильность частоты в течение этого периода характеризуется параметрами МОВИ и ДВИ (см. ниже).
____________
6 Соответствует параметру "Относительная погрешность по частоте" в отечественных нормативных документах (см. сноску на стр. VI).
Полученное значение для времени измерения 7 суток в соответствии с [5; 13] не должно быть более 1×10-11 f . При вводе в эксплуатацию может проводиться проверка относительного отклонения частоты на соответствие техническим данным, гарантируемым производителем конкретной аппаратуры в течение других периодов измерения (больших или меньших).
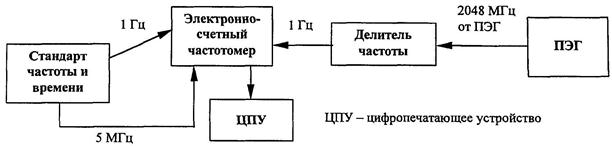
Рисунок 1: Схема
сличения тактовой частоты на выходах ПЭГ с помощью
перевозимого стандарта частоты и времени фазово-временным методом
Данный способ рекомендуется при проведении сличения частоты органом Госстандарта РФ, при условии, что при этом применяется аттестованный делитель частоты. Выпускаемых серийно делителей частоты, удовлетворяющих требованиям данного измерения, не имеется.
2.2.1.2 Сравнение частот с помощью перевозимого стандарта частоты и времени (источник "а" п. 1.3.4.5) может осуществляться по схеме рисунка 2 при использовании специализированного СИЭ, предназначенного для измерения отклонения частоты по внешнему опорному сигналу и параметров дрейфа фазы. В зависимости от того, на какую частоту (5 или 10 МГц) внешнего опорного сигнала рассчитан данный тип прибора и какую частоту имеет применяемый стандарт частоты, сигнал от него подается на прибор или непосредственно, или через дополнительное устройство, обеспечивающее умножение частоты. СИЭ устанавливается в необходимый режим измерения (количество отсчетов и время измерения) и на экран (и при необходимости на печать) выводятся в виде графиков результаты измерения Df/f0 в зависимости от времени. Эти результаты показывают относительное отклонение частоты синхросигнала на выходе ПЭГ от частоты опорного генератора (стандарта частоты) и нестабильность ее во времени в течение установленного сеанса измерений.
Удобным является также определение относительного отклонения частоты по графику зависимости МОВИ (MTIE) от времени. Тогда искомое значение можно определить по формуле:
![]() (2.3)
(2.3)
где МОВИкон и МОВИнач - значения МОВИ в конце и начале периода измерения соответственно;
tкон и tнач -значения времени по оси X в конце и начале периода (или интервала) измерения соответственно.
При сличении частоты в течение длительных периодов измерения искомое значение относительного отклонения частоты может быть подсчитано по формуле 2.2 из результатов для более коротких интервалов, определенных по формуле 2.3.
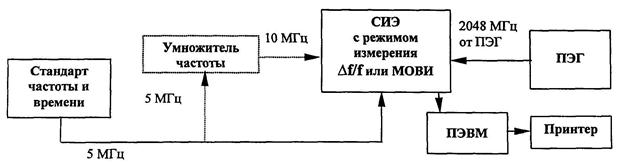
Рисунок 2: Схема сличения тактовой частоты на выходах ПЭГ
с помощью
перевозимого стандарта частоты и времени и
СИЭ, имеющего режим измерения отклонения частоты
2.2.2 Способ сличения тактовой частоты на выходах ПЭГ с помощью приемника-компаратора частоты
2.2.2.1 Сличение выполняется непосредственно в приемнике-компараторе частоты -генераторе опорного сигнала ГОС-2 (см. раздел 3) по радиосигналам РБУ и РТЗ: 66,(6) и 50 кГц соответственно. Приемник-компаратор должен иметь вариант комплектации, обеспечивающий сличение частоты на выходе 2048 кГц и 2048 кбит/с.
ПРИМЕЧАНИЕ: Описание метода измерения приводится ниже применительно к прибору ГОС-2, так как он практически является единственным прибором подобного типа.
2.2.2.2 Сигнал, частота которого подлежит сличению, в зависимости от того с какого выхода ПЭГ он снимается, подключается к разъему 2048 kHz или 2048 кбит/с.
2.2.2.3 При наличии эталонного радиосигнала на входе приемника и режима синхронизации следящей фазометрической системы, что индицируется специальными кнопками, на табло осуществляется индикация относительного отклонения частоты или набега фазы в мкс (в зависимости от нажатой кнопки) за установленный интервал времени. Последний устанавливается в зависимости от общей длительности измерения с учетом емкости памяти (см. п. 2.2.2.4)
2.2.2.4 В энергонезависимой памяти прибора сохраняются результаты (до 999 отсчетов), дата и время, в которое они получены и состояние прибора в эти моменты времени (авария, наличие радиосигнала, достоверность отсчета). Содержимое памяти может быть просмотрено на табло прибора и передано в ПЭВМ по интерфейсу RS-232 для дальнейшей обработки и распечатки с помощью поставляемой с прибором программы.
2.2.2.5 В случае установки индикации режима набега фазы можно проследить за появлением скачков фазы в течение периода измерений.
Относительное отклонение частоты определяется при этом по формуле:
![]() (2.4)
(2.4)
где Dj1 и Dj2 - набег фазы в мкс, зарегистрированный в начальный момент времени t1 и в момент времени t2; t1 и t2 выражены в секундах.
2.2.2.6 Если вычисленная величина Dj > 0, то частота эталонного радиосигнала, принятого из эфира, выше частоты измеряемого сигнала, если Dj < 0, то ниже ее.
2.3 Параметры дрейфа фазы и нарушение непрерывности фазы синхросигналов
2.3.1 Измерение параметров дрейфа фазы синхросигналов (МОВИ, ДВИ), а также нарушений непрерывности фазы (непостоянства фазы), т.е. величины скачков фазы при переключениях в аппаратуре, выполняется специализированными средствами измерения (см. раздел 3). Измерение проводится для синхросигналов как на выходе 2048 кГц, так и на выходе 2048 кбит/с.
2.3.2 Измерение этих параметров синхросигналов на выходах ПЭГ должно проводиться при использовании внешнего опорного сигнала, который может быть получен или от стандарта частоты ("а" п. 1.3.4.5), или от опорного генератора, синхронизированного по радиосигналам эталонной частоты ("б" п. 1.3.4.5).
2.3.3 Современные средства измерения, предназначенные для измерения параметров дрейфа фазы (см. раздел 3), состоят из аппаратного блока, работающего совместно с IBM-совместимой ПЭВМ по загружаемой программе, поставляемой с прибором. Программа обеспечивает управление процессом измерений (получению отсчетов ОВИ) и вычисление из этих отсчетов других характеристик дрейфа фазы и относительного отклонения частоты. Поэтому измерение требуемых характеристик сводится к работе с прибором согласно руководству по эксплуатации при подключении на его вход измеряемого сигнала с выхода ПЭГ и внешнего сигнала опорной частоты.
Перед началом измерений параметров дрейфа фазы следует установить количество отсчетов (или время измерений) и время между отсчетами (время выборки).
Для проверки ПЭГ на соответствие нормам необходимо проведение как относительно кратковременных сеансов измерения: 1200 с и 12000 с - для проверки норм при t < 1000 с и t < 10000 с соответственно и долговременных: 86400 с (1 сутки) - для проверки сетевых норм при t > 30000 с. При сеансе 1200 с время между отсчетами следует устанавливать 0,03 с; 12000 с - 1с; 86400 с - 3 с.
ПРИМЕЧАНИЕ: В соответствии с алгоритмами вычисления измеряемых параметров дрейфа фазы время сеанса измерения должно устанавливаться больше времени, для которого должна проводиться оценка соответствия нормам: для МОВИ - на 20-30 %, для ДВИ - в 3-12 раз (в зависимости от типа применяемого прибора, т.е. алгоритма обработки).
2.3.4 Графики зависимости МОВИ и ДВИ от времени вместе с масками, соответствующими нормам на эти параметры для ПЭГ (в соответствии с Рекомендацией МСЭ-Т G.811 [9] и/или стандартом ETS 300 462-6 [13]), можно наблюдать на экране ПЭВМ или распечатать на подключенном к ней принтере.
2.3.5 Проверку скачков фазы при переключениях в оборудовании рекомендуется наблюдать при индикации на экране зависимости ОВИ от времени. При этом скачок фазы наблюдается на экране непосредственно в единицах времени. Сопоставив наблюдаемое значение с длительностью единичного интервала (ТИ = 488 нс для сигнала 2048 кбит/с), определяют, соответствует ли он норме (1/8 ТИ). При проведении этих измерений следует установить количество отсчетов не менее 1000, а время между отсчетами - не более 1 с.
2.3.6 Характер изменения тактовой частоты сигналов на выходе ПЭГ можно наблюдать при отображении на экране зависимости относительного отклонения частоты (Df/f) от времени, что может потребоваться при эпизодическом контроле, связанном с определением причины и места повреждения.
2.4 Фазовое дрожание синхросигналов
2.4.1 Измерение фазового дрожания синхросигналов выполняется средствами измерений, специально предназначенными для измерения этого параметра или, как правило, универсальными анализаторами цифровых сигналов, имеющими режим измерений этого параметра и удовлетворяющими необходимым требованиям (см. п. 3.1.5).
2.4.2 Измерение, как и в предыдущем случае, сводится к работе с прибором согласно руководству по эксплуатации на него при подключении на его вход сигнала с выхода ПЭГ. Измеренные результаты измерений размаха фазового дрожания с установленными граничными частотами полосового фильтра (20 Гц и 100 кГц) считываются с табло прибора или распечатываются на встроенном или внешнем принтере.
2.5 Параметры импульсов синхросигналов
2.5.1 Параметры импульсов синхросигналов (амплитуда, длительность, время нарастания и спада импульса) являются характеристиками стандартных стыков электрических цифровых каналов и трактов передачи (ГОСТ 26886 [2] и Рекомендации МСЭ-Т G.703 [21]), которым должны соответствовать синхросигналы на выходах ПЭГ. Поэтому методы их измерения должны соответствовать [4]. Измерение периодических сигналов, каковыми являются синхросигналы на выходах ПЭГ 2048 кГц и 2048 кбит/с, выполняется с помощью осциллографов, обеспечивающих точность измерения по горизонтали и вертикали, а также соответствие времени нарастания переходной характеристики прибора (крутизны) измеряемому импульсу (см. раздел 3).
2.5.2 Измерение параметров импульсов синхросигналов должно проводиться при номинальной нагрузке выходов ПЭГ. При использовании осциллографов значение входного сопротивления на низкоомном входе обычно 50 или 75 Ом, необходимо пользоваться высокоомным входом, подключаемым через согласующее и/или симметрирующее устройство.
2.5.3 Контролируют форму импульсов сигнала как положительной, так и отрицательной полярности путем сравнения изображения на экране осциллографа с шаблонами, указанными в ГОСТ 26886-86 [2]. При этом проверяются:
• амплитуда импульса;
• пиковое напряжение положительной и отрицательной полярности в отсутствии импульса;
• длительность импульса;
• отношение амплитуд импульсов разной полярности в середине тактового интервала и отношение длительности импульсов разной полярности на уровне половины номинальной амплитуды.
Кривая импульса, наблюдаемая на экране осциллографа, должна находиться в пределах шаблона импульсов того стандартного стыка, которому соответствует измеряемый синхросигнал на выходе ПЭГ (шаблоны приводятся в Приложении Б).
Практические рекомендации по проверке формы импульсов следующие:
• для синхросигнала 2048 кГц, форма импульсов которого должна соответствовать шаблону синхронизационного стыка на 2048 кГц (раздел 8 ГОСТ 26886-86 [2]), достаточно проводить измерение амплитуды сигнала (с помощью вольтметра или осциллографа), убедившись с помощью осциллографа, что фронт нарастания и спада сигнала в пределах от минус 1 до +1 В является монотонным. Обоснованием для этого является то, что сигнал любой формы от синусоидальной до прямоугольной с амплитудой импульса положительной, так и отрицательной полярности от 1 до 1,9 В при монотонности сигнала в пределах от минус 1 до +1 В соответствует заданному шаблону;
• для синхросигнала 2048 кбит/с, форма импульсов которого должна соответствовать шаблону первичного сетевого стыка (раздел 4 ГОСТ 26886-86 [2]), рекомендуется выполнять анализ формы сигнала по частям, путем наблюдения импульса на экране осциллографа без встроенной маски с учетом установленных значений цены деления экрана по вертикали и горизонтали, а именно:
- сначала следует отрегулировать кривую относительно координатной сетки экрана, совместив его среднюю линию с одной из горизонтальных линий сетки, а середину фронтов (или хотя бы один фронт) с вертикальными линиями;
- затем следует убедиться, во-первых, что напряжение в середине импульса находится в пределах 3 ± 0,3 В,
- во-вторых, что амплитуда выбросов переднего и заднего фронтов находится в
пределах 3 ± 0,6 В,
- в-третьих, что при отсутствии импульса напряжение не превышает ±0,3 В,
- в-четвертых, что ширина импульса на уровне 1,5 В находится в пределах 244 ± 25 нс.
2.5.4 При использовании СИ, имеющих режим наблюдения формы импульса и сравнения с шаблонами, следует обратить внимание на необходимость наличия сертификатов Госстандарта России и Госкомсвязи России (см. п. 1.1), а также соответствие требованиям по точности измерения (см. раздел 3).
3 СРЕДСТВА ИЗМЕРЕНИЙ
3.1 Требования к СИ
3.1.1 Общие требования
3.1.1.1 Электропитание приборов, применяемых при контроле параметров ПЭГ, должно осуществляться от сети переменного тока с частотой (50 ± 2,5)Гц и напряжением 220 (+22 -33) В и содержанием гармоник до 10 % в соответствии с ГОСТ 5237 [23] или от встраиваемых источников постоянного тока. Это требование относится к СИЭ. Допускается, чтобы СИ общего применения и другие технические средства соответствовали требованиям ГОСТ 22261 [24].
3.1.1.2 По устойчивости к климатическим и механическим воздействиям приборы должны соответствовать требованиям 3-й группы ГОСТ 22261 [24] (для работы в отапливаемых помещениях).
3.1.1.3 Приборы по требованиям к времени установления режима, конструкции, надежности, электрической прочности и сопротивлению изоляции и другим требованиям по электробезопасности, требованиям к электромагнитной совместимости (радиоэлектронной защите), маркировке, упаковке и хранению должны соответствовать ГОСТ 22261 [24].
3.1.1.4 Приборы в отношении создаваемых ими радиопомех должен соответствовать требованиям ГОСТ 30428 [25] для класса А (эксплуатация вне жилых помещений).
3.1.1.5 Средства измерений, применяемые при контроле параметров ПЭГ, должны соответствовать требованиям, изложенным в п. 1.1. Они должны иметь эксплуатационную техническую документацию и отметку об очередной поверке. Запрещается применять средства измерений, срок обязательной поверки которых истек.
3.1.1.6 Ниже в п.п. 3.1.2 - 3.1.6 приводятся технические требования к основным характеристикам, в том числе метрологическим, средств измерений нормируемых параметров сигналов на выходах ПЭГ, необходимым для измерений по методикам, приведенным в разделе 2.
3.1.2 Средства измерений для схемы сличения по стандарту частоты и времени
3.1.2.1 Основными требованиями к стандарту частоты и времени, применяемому при измерениях по методике п. 2.2.1.1 и 2.2.1.2, являются:
• относительная погрешность по частоте за год, которая должна быть не более ±1,5×10-12;
• нестабильность частоты выходного сигнала, которая должна быть не более ±2×10-13 за 100 с, ±3×10-14 за 24 часа;
• частота выходных сигналов должна быть 5 или 10 МГц, а также 1 Гц.
3.1.2.2 Остальные требования к стандарту частоты и времени должны соответствовать данному классу СИ.
3.1.2.4 Делитель частоты, применяемый в схеме сличения частоты (рисунок 1) должен обеспечить деление частоты 2,048 МГц с выхода ПЭГ до частоты 1 Гц без изменения ее параметров.
3.1.2.5 Умножитель частоты, применяемый в схеме сличения частоты (рисунок 2) должен обеспечить умножение частоты 5 МГц с выхода стандарта частоты до частоты 10 МГц без изменения ее параметров.
3.1.2.6 Электронно-счетный частотомер должен иметь режим измерения интервалов времени с разрешающей способностью не более 10 нс.
3.1.3 Приемник-компаратор частоты
3.1.3.1 Прибор должен обеспечивать работу от радиосигналов:
• РБУ - 66,(6) кГц;
• РТЗ - 50,0 кГц.
3.1.3.2 Чувствительность прибора при приеме радиосигналов должна быть не хуже 0,5 мВ.
3.1.3.3 Прибор должен обеспечивать сличение частоты подаваемого на вход сигнала 2048 кГц. Погрешность сличения частот по результатам измерений набега фазы должна быть не хуже ±5 10-12 при времени измерения 24 часа и ±5 10-13 при времени измерения 10 суток.
Должен быть предусмотрен вход для подлежащего сличению по частоте сигналу со скоростью 2048 кбит/с в коде HDB-3 [21].
3.1.3.4 Индикация относительного отклонения частоты сличаемого сигнала должна осуществляться в диапазоне не менее, чем от ±1×10-6 до ±1×10-12. Индикация набега фазы сличаемого сигнала должна осуществляться с дискретностью не более 0,01 мкс.
3.1.3.5 Прибор должен обеспечивать получение на выходе сигналов, синхронизируемых по принимаемым радиосигналам, со среднеквадратическим относительным отклонением частоты не более ±3×10-12 за 100 с и относительной погрешностью частоты не более ±5×10-12 за 24 часа.
ПРИМЕЧАНИЕ: Метрологические характеристики частоты выходных сигналов впрямую не определяют погрешности сличения частоты, эти требования заданы для применения выходных сигналов в качестве внешних опорных сигналов для измерителей параметров дрейфа фазы при измерении синхросигналов на выходе ПЭГ.
3.1.3.6 Выходные сигналы должны иметь частоту 1; 5; или 10 МГц на нагрузке 50 Ом и 2048 кГц на нагрузке 120 Ом с размахом не менее 1 В.
3.1.4 Средство измерения нестабильности частоты и параметров дрейфа фазы цифровых сигналов
3.1.4.1 Прибор должен обеспечивать измерение параметров нестабильности частоты и дрейфа фазы в цифровых сигналах электросвязи, в том числе:
• измерение ошибки временного интервала (ОВИ) тактовых синхросигналов;
• вычисление параметров нестабильности частоты и дрейфа фазы тактовых синхросигналов (на основе необработанных данных измерения ОВИ) в соответствии с Рекомендацией МСЭ-Т G.810 [5]: Df/f0, МОВИ и ДВИ.
• сравнение вычисленных значений параметров дрейфа фазы с масками Рекомендаций МСЭ-Т G.811 [9] (стандарта ETS 462-300-6 [13]) и стандарта ETS 462-300-3 [14]).
3.1.4.2 Прибор должен соответствовать Рекомендации МСЭ-Т О.172 [6] и ОСТ 45.134-99 [26].
3.1.4.3 Относительная погрешность частоты эталонного сигнала при проверке параметров ПЭГ (от встроенного или внешнего генератора) в рабочем диапазоне температур должна быть не хуже ±(3¸5)×10-12 в течение недели.
3.1.4.4 Максимальное время дискретизации t0 при измерении ОВИ в пределах интервалов наблюдения до 1000 с должно быть равным 1/30 секунды, до 100000 с - 3,3 с.
3.1.4.5 Диапазон измерения ОВИ должен быть не менее ±100 мкс.
3.1.4.6 Максимальный период измерения должен быть не менее 1000000 с.
3.1.4.7 Параметры дрейфа фазы должны измеряться через измерительный фильтр нижних частот первого порядка с эквивалентной полосой 10 Гц и следующими характеристиками:
• измерительный фильтр нижних частот должен иметь характеристику и спад 20 дБ на декаду. Точка на уровне 3 дБ измерительного фильтра должна быть на частоте 10 Гц ±10 %;
• неравномерность измерительного фильтра в полосе пропускания в диапазоне от 1 до 10 Гц должна быть менее ± 0,2 дБ (относительно усиления на частоте 0,1 Гц), а максимальное затухание должно быть менее 30 дБ.
3.1.4.8 Для каждого измерения в течение интервала наблюдения t суммарная погрешность измерения ОВИ должна быть менее:
±5 % от измеряемого значения ОВИ ± Z0(t),
где Z0(t) приводится в таблице 2, а t является интервалом наблюдения.
Таблица 2 - Систематическая погрешность (Z0) измерения ОВИ
|
Z0(t) (нс) |
Интервал наблюдения, t (с) |
|
2.5 + 0.0275 t |
0.05 £ t £ 1000 |
|
29 +0.001 t |
t > 1000 |
3.1.4.9 Должна быть обеспечена возможность отображения результатов измерения относительного отклонения частоты измеряемого сигнала от частоты внешнего опорного генератора Df/f0 с разрешающей способностью не хуже 1×10-12.
3.1.4.10 Должна быть обеспечена возможность измерения (на основе расчета результатов измерений ОВИ) максимальной ошибки временного интервала МОВИ -наибольшего размаха ОВИ в любом интервале наблюдения длительностью t и девиации временного интервала ДВИ - меры дрейфа фазы, которая характеризует его спектральное содержание.
3.1.5 Средства измерения фазового дрожания цифровых сигналов
3.1.5.1 Используемый прибор должен обеспечивать измерение фазового дрожания в цифровых сигналах электросвязи со скоростью 2048 кбит/с и может быть выполнен в виде отдельного устройства или предусматривать данный режим измерения наряду с характеристиками дрейфа фазы и другими параметрами цифровых сигналов (показателями ошибок и др.).
3.1.5.2 Прибор должен соответствовать Рекомендации МСЭ-Т О.171 [27].
3.1.5.2 Прибор должен работать от собственного тактового генератора с относительным отклонением частоты от номинального значения не более ±1×10-5, а также от внешних сигналов тактовой синхронизации сигнала.
3.1.5.3 Должно обеспечиваться измерение полного размаха фазового дрожания сигнала, поступающего на вход прибора, в течение интервала 60 с. Разрешающая способность при измерении должна быть не более 0,01 ТИ на нижнем пределе измерений, верхняя граница которого должна быть не более 2 ТИ.
3.1.5.4 Должно предусматриваться измерение через полосовой фильтр с граничными частотами 20 Гц и 100 кГц.
Характеристики фильтра в пределах полосы пропускания должны обеспечивать соблюдение требований, предъявляемых к точности функции измерения фазового дрожания. К функции измерения фазового дрожания при использовании измерительных фильтров верхних и нижних частот предъявляются следующие требования:
• измерительный фильтр верхних частот с частотой среза 20 Гц должен иметь характеристику первого порядка и спад 20 дБ на декаду;
• измерительный фильтр нижних частот должен иметь максимально плоскую характеристику Баттерворта и спад 60 дБ на декаду.
• номинальные значения частот среза измерительных фильтров на уровне точки 3 дБ должны отличаться от номинальных не более, чем на ±10 %.
• максимальное затухание измерительных фильтров должно быть не менее 60 дБ.
3.1.5.5 Суммарная погрешность измерения при частоте фазового дрожания 1 кГц должна быть менее
±5 % от показания ±W, ТИ
где W - систематическая погрешность, в которую входят все составляющие, определяемые функцией выделения внутренней тактовой частоты, и которая не должна превышать 0,015 ТИ при измерении синхросигнала с тактовой частотой 2048 кГц.
3.1.5.6 Дополнительная погрешность измерения фазового дрожания на частотах фазового дрожания, отличающихся от 1 кГц, должна быть не выше ±2 % при измерении синхросигнала с тактовой частотой 2048 кГц.
3.1.5.7 При измерении размаха фазового дрожания желательно, чтобы предусматривался также счет числа и периодов времени превышения заранее выбранного порога с обеспечением возможности документирования этих событий на внешнем или внутреннем счетчике. При наличии этой функции должна быть возможность установки порога на любое значение в пределах диапазона измерений фазового дрожания.
3.1.6 Средства измерения параметров формы импульсов синхросигналов
3.1.6.1 Основными СИ, обеспечивающими измерение параметров формы импульсов синхросигналов, являются осциллографы.
3.1.6.2 Применяемый осциллограф должен иметь время нарастания переходной характеристики меньше допустимого значения минимальной ширины фронта проверяемого импульса: ±10 % на высоте 1/2 от номинальной амплитуды импульса для стыка 2048 кбит/с, т.е. ±25 нс, следовательно время нарастания переходной характеристики осциллографа должна быть не более 10 нс.
3.1.6.3 Погрешность измерения напряжения импульсов должна быть не более ±3 %.
3.1.6.4 Погрешность измерения длительности импульсов должна быть не более ±3 %.
3.2 Перечень рекомендуемых СИ
3.2.1 Рекомендуемые средства измерений и вспомогательных устройств с указанием их основных технических характеристик, приводятся ниже в таблице 3. В таблице 4 даются сведения об их производителях или поставщиков и правовом статусе рекомендуемых СИ.
3.2.1 При проведении измерения параметров синхросигналов на выходах ПЭГ допускается использование СИ, не приведенных в перечне, но удовлетворяющие необходимым требованиям (см. разделы 1.1 и 3.1).
Таблица 3 - Перечень рекомендуемых средств измерений
|
Наименование вида СИ |
Тип СИ |
Основные технические характеристики |
Примечание |
|
1 Стандарт частоты и времени |
Ч1-76 |
1 Гц; 5 МГц. (1±0,2) В на 50 Ом. Относительная погрешность по частоте за год: не более ±1,5×10-12; нестабильность сигнала 5 МГц: за 10 с - ±5×10-13, за 100 с -±1,5×10-13, за 24 часа - ±1×10-14 |
Для сличения частоты ПЭГ |
|
2 Частотомер электронно-счетный |
Ч3-64/1 |
0,005 Гц- 1,5 ГГц; 10 нс - 2×104 с Погрешность ±5×10-7. |
Для сличения частоты ПЭГ |
|
3 Приемник-компаратор |
ГОС-2 |
Приемник радиосигналов 66,(6) и 50 кГц. Сличение частот (0,1×N) МГц, где N = 100, 2048 кбит/с или 2048 кГц с погрешностью за сутки не более ±5×10-12, за 10 суток не более ±5×10-13. |
1) Для сличения частоты ПЭГ и измерения непостоянства фазы |
|
2) Разработка заканчивается, сертификация - в 1999 г. |
|||
|
4 Средство измерения нестабильности частоты и параметров дрейфа фазы цифровых сигналов |
ИВО-1М |
Измерение ОВИ, МОВИ, ДВИ, Df/f0 при разрешающей способности 100 пс. Относительная погрешность и нестабильность частоты встроенного опорного генератора - не более ± 1×10-10 за сутки |
Сертификация в Госкомсвязи РФ и Госстандарте РФ заканчивается. |
|
OSA 5565 STS |
Измерение ОВИ, МОВИ, ДВИ, Df/f0 при разрешающей способности 100 пс. Относительная погрешность и нестабильность частоты встроенного опорного генератора - не более ± 1×10-10 за сутки |
||
|
ИВХ-1 |
Измерение ОВИ, МОВИ, ДВИ, Df/f0 при разрешающей способности 10 пс. Относительная погрешность и нестабильность частоты встроенного опорного генератора - не более ±3×10-11 за сутки |
Разработка не закончена, срок -декабрь 1999 г., сертификация - II кв. 2000 г. |
|
|
5 Средство измерения фазового дрожания цифровых сигналов |
ANT-20 |
Стыки от 2 до 140 Мбит/с по ГОСТ 26886, 155 Мбит/с по Рекомендации МСЭ-Т G.703. Введение и измерение фазового дрожания, погрешности - по Рек. МСЭ-Т О.171 (PDH) и О.172 (SDH). Нижний диапазон/разреш. способность: от 0 до 2 ТИ/ 0,001 ТИ. |
Измерение на выходах 2048 МГц и 2048 кбит/с |
|
НР 37717С |
Стыки от 2 до 140 Мбит/с по ГОСТ 26886, 155 Мбит/с по Рекомендации МСЭ-Т G.703. Введение и измерение фазового дрожания, погрешности - по Рек. МСЭ-Т О.171 (PDH) и О.172 (SDH). Нижний диапазон/разреш. способность: от 0 до 1,6 ТИ/ 0,01 ТИ. |
Измерение на выходах 2048 кбит/с |
|
|
МР 1550 (МР 1552) |
Стыки от 2 до 140 Мбит/с по ГОСТ 26886, 155 Мбит/с по Рекомендации МСЭ-Т G.703. Введение и измерение фазового дрожания, погрешности - по Рек. МСЭ-Т О.171 (PDH) и О.172 (SDH). Нижний диапазон/разреш. способность: от 0 до 2 ТИ/ 0,001 ТИ. |
Измерение на выходах 2048 кбит/с |
|
|
6 Средство измерений параметров формы импульсов синхросигналов |
С1-97 |
0 - 350 МГц; 5 мВ/дел - 0,5 В/дел; время нарастания ПХ менее 1 нс; погрешности измерения не более: по оси X - 4 % и Y - 3 %; 1 МОм, 50 Ом |
|
|
С1-108 |
0 - 350 МГц; 10 мВ/см - 1 В/см; время нарастания ПХ менее 1 нс; погрешности измерения не более: по оси X - 1 % и Y - 1,5 %; 100 кОм, 50 Ом |
||
|
7 Устройство согласования (для измерений на выходах ПЭГ 2048 кбит/с с помощью СИ с несим. входом) |
УС-Е1, Е2 |
120 Ом сим./75 Ом несим.: 1 кГц - 3 МГц, вносимое затухание £ 0,5 дБ, затухание несогласованности на сим. входе ³ 30 дБ. |
Изделие в составе ТИС-Е1, поставляется отдельно, как ЯЕАК 458353.004 |
|
8 Устройство согласования (для измерений с помощью СИ со входом 50 Ом) |
75 Ом/50 Ом: затухание фиксированное £ 6 дБ с погрешностью ±0,02 дБ, 0 - 300 МГц. |
Использовать переходы согласующие 75®50 Ом к типовым осциллографам |
Таблица 4 - Сведения о рекомендуемых средствах измерений
|
Тип СИ |
Наименование СИ |
Наличие сертификата |
Изготовитель |
Габариты и масса |
|
|
Госстандарта РФ |
Отрасли "Связь" |
||||
|
Ч1-76 |
Стандарт частоты и времени водородный |
+ |
не треб. |
ННПИ "Кварц", г. Н.Новгород |
280´480´555 мм, 55 кг |
|
Ч3-64/1 |
Частотомер электронно-счетный |
+ |
не треб. |
ЗАО "Супертехприбор", Москва |
488´133´574 мм, 21 кг |
|
ГОС-2 |
Генератор опорного сигнала |
- |
- |
ООО "Стабихрон", г. Н.Новгород |
597x´238´128 мм, 15 кг |
|
OSA 5565 STS |
Установка для испытания системы тактовой синхронизации |
+ |
+ |
Oscilloquartz S.A., Швейцария |
145´275´400 мм, 7,5кг плюс ПЭВМ |
|
ИВО-1М |
Измеритель временных отклонений |
+ |
+ |
ООО "Алто", С-Петербург |
419´155´376 мм, 10 кг плюс ПЭВМ |
|
ИВХ-1 |
Измеритель временных характеристик |
- |
- |
ООО "Стабихрон", г. Н.Новгород |
597´238´128 мм, 15 кг плюс ПЭВМ |
|
ANT-20 |
Сетевой тестер (для ПЦИ и СЦИ) |
+ |
+ |
Wandel&Goltermann, ФРГ |
320´350´170 мм, 10 кг |
|
НР 37717С |
Анализатор параметров систем передачи |
+ |
+ |
Hewlett-Packard, Великобритания |
340´190´420 мм, 11 кг |
|
МР 1550 А/В |
Анализатор ПЦИ/ СЦИ |
+ (на партию для ОАО "Ростелеком") |
+ (на партию для ОАО "Ростелеком") |
Anritsu, Япония |
320´177´215 мм, 13 кг |
|
С1-97 |
Осциллограф двухканальный |
+ |
не треб. |
ЗАО "Супертехприбор", Москва |
360´200´420 мм, 18 кг |
|
С1-108 |
Осциллограф двухканальный |
+ |
не треб. |
ЗАО "Супертехприбор", Москва |
200´200´480 мм, 17 кг |
|
УС-Е1, Е2 |
Устройство согласования |
не треб. |
+ (в составе ТИС-Е1) |
ЗАО "Технодалс", С-Петербург |
0,2 кг |
ПРИЛОЖЕНИЕ А
РЕКОМЕНДАЦИИ МСЭ-Т И СТАНДАРТЫ ETS,
КАСАЮЩИЕСЯ МЕТРОЛОГИЧЕСКОГО ОБЕСПЕЧЕНИЯ ПЭГ
А.1 Рекомендация МСЭ-Т G.811 (09/97) Временные характеристики на выходах первичных эталонных генераторов
Реферат
В данной Рекомендации даются в общих чертах минимальные требования для устройств тактовой синхронизации, используемых в качестве первичных эталонных задающих генераторов в сетях синхронизации. Эти сети включают Телефонные сети общего пользования (PSTN) и Сети синхронной цифровой иерархии (SDH).
Ключевые слова
• Нормы на качественные показатели задающего1 генератора
• Параметры качественных показателей задающего генератора
• Качественные показатели фазового дрожания
• Задающий генератор
• Качественные показатели дрейфа фазы
___________
1 Под задающим генератором здесь и далее в тексте понимается генератор, используемый для синхронизации, т.е. получения сигналов тактовой частоты.
1 Назначение2
В данном документе даются в общих чертах требования к первичным эталонным генераторам (ПЭГ, PRC), пригодным для обеспечения синхронизации в цифровых сетях. Эти требования применимы при нормальных окружающих условиях, установленных для цифрового оборудования.
Типичный PRC обеспечивает эталонный сигнал для тактовой синхронизации или синхронизации других задающих генераторов в пределах сети или участка сети. Долговременная относительная погрешность PRC должна поддерживаться как 1 на 1011 или лучше путем проверки по Всемирному координированному времени (UTC). PRC может быть реализован как автономный задающий генератор, работающий независимо от других источников. В качестве альтернативы может быть реализован неавтономный задающий генератор, который контролируется по точным, полученным от UTC по радио или спутниковым системам. В любом случае требования долговременной точности и кратковременной стабильности применяются, как установлено в данной Рекомендации.
Долговременная относительная погрешность PRC, как 1 на 1011 или лучше, является адекватной тому, что одиночный PRC обеспечивает эталонный сихронизирующий сигнал для всех других задающих генераторов в пределах сети (синхронный режим работы). При псевдосинхронном режиме, т.е. когда тактовая синхронизация не всех задающих генераторов в пределах сети осуществляется от того же самого PRC, долговременная относительная погрешность зависит от числа PRC в данной сети.
____________
2 Сохранена нумерация оригинала рекомендации G.811.
Когда в сети используется более одного PRC, необходим статистический подход для определения долговременной относительной погрешности каждого PRC в данной сети.
2 Ссылки
Приведенные ниже Рекомендации МСЭ-Т и другие материалы, на которые даются ссылки, обеспечивают содержание данной Рекомендации. Издания указаны на время публикации. Все Рекомендации и другие ссылочные материалы подвергаются изменениям; всем пользователям данной Рекомендации, поэтому следует проверять возможность применения самой последней редакции Рекомендаций и других ссылочных материалов, перечисленных ниже. Перечень последних принятых Рекомендаций МСЭ-Т регулярно публикуется.
|
[1] |
Рекомендация G.703 - Физические/электрические характеристики иерархических цифровых интерфейсов. |
|
[2] |
Рекомендация G.783 - Характеристики функциональных блоков аппаратуры синхронной цифровой иерархии. |
|
[3] |
Рекомендация G.810- Термины и определения для сетей синхронизации. |
|
[4] |
Рекомендация G.812 - Временные характеристики на выходах ведомых задающих генераторов, пригодных для обеспечения плезиохронной работы международных цифровых трактов. |
|
[5] |
Рекомендация G.813 - Временные характеристики ведомых задающих генераторов (SEC) для оборудования SDH. |
|
[6] |
Рекомендация G.822 - Нормы на частость управляемых проскальзываний в международном цифровом соединении. |
|
[7] |
Рекомендация G.823 - Управление дрожанием и дрейфом фазы в цифровых сетях, основанных на иерархии 2048 кбит/с. |
|
[8] |
Рекомендация G.824 - Управление дрожанием и дрейфом фазы в цифровых сетях, основанных на иерархии 1544 кбит/с. |
|
[9] |
Рекомендация G.825 - Управление дрожанием и дрейфом фазы в цифровых сетях, основанных на синхронной цифровой иерархии. |
3 Определения
Термины и определения, используемые в данной Рекомендации, содержатся в Рекомендации МСЭ-Т G.810.
4 Аббревиатуры
В Рекомендациях по тактовой синхронизации применяются следующие аббревиатуры:
|
CMI |
Coded Mark Inversion |
Код с инверсией посылок |
|
FFM |
Flicker Frequency Modulation |
Мерцающая частотная модуляция |
|
FPM |
Flicker Phase Modulation |
Мерцающая фазовая модуляция |
|
МTIЕ (МОВИ) |
Maximum Time Interval Error |
Максимальная ошибка (погрешность) временного интервала |
|
NE |
Network Element |
Элемент сети |
|
PDH (ПЦИ) |
Plesiochronous Digital Hierarchy |
Плезиохронная цифровая иерархия |
|
PRC |
Primary Reference Clock |
Первичный эталонный задающий генератор |
|
SDH (СЦИ) |
Synchronous Digital Hierarchy |
Синхронная цифровая иерархия |
|
SEC |
SDH Equipment Clock |
Задающий генератор оборудования SDH |
|
SSMB |
Synchronization Status Message Byte |
Байт сообщения о состоянии синхронизации |
|
STM |
Synchronous Transport Module |
Синхронный транспортный модуль |
|
TDEV |
Time Deviation |
Девиация времени |
|
UI (ТИ) |
Unit Interval |
Единичный (тактовый) интервал |
|
UTC |
Coordinated Universal Time |
Всемирное координированное время |
|
WFM |
White Frequency Modulation |
Белая частотная модуляция |
5 Точность частоты
Максимально допустимой относительной погрешностью (отклонением) частоты при времени наблюдении более одной недели является значение 1 на 1011 для всех рабочих условий окружающей среды.
6 Генерация шума
Генерация шума задающего генератора PRC представляется в виде величины шума, поступающего на его выход. Подходящий для практических целей измерения эталон имеет более высокий уровень качественных показателей по стабильности, чем требования к выходному сигналу. Полезным для характеристик качественных показателей по генерации шума является измерение MTIE и девиации времени (TDEV).
MTIE и TDEV измеряются через измерительный фильтр нижних частот первого порядка, эквивалентный 10 Гц при максимальном времени дискретизации t0 в 1/30 с. Минимальный период измерения для TDEV в 12 раз больше времени интеграции (Т = 12t). Для измерений в течение более долгого времени из практических соображений может потребоваться альтернативная полоса фильтра и время дискретизации.
6.1 Дрейф фазы
Дрейф фазы, выраженный в MTIE, измеренный при помощи схемы независимого задающего генератора, показанной на Рис. 2а Рекомендации G.810, должен быть в следующих пределах:
|
MTIE: |
0,275 ´ 10 -3t + 0,025 µs |
для |
0,1 < t £ 1000 с |
|
10-5t + 0,29 µs |
для |
t > 1000 с |
Результирующие требования показаны на Рис. А.1.1 (рис. 1/G.811)
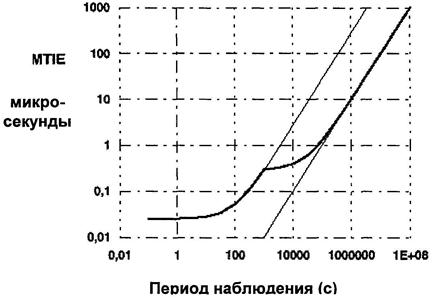
Рисунок 1/G.811: MTIE как функция периода наблюдения (интеграции) t
Дрейф фазы, выраженный в TDEV, измеренный при помощи схемы независимого задающего генератора, показанной на Рис. 2а Рекомендации G.810, должен быть в следующих пределах:
|
TDEV: |
3 нс |
для |
0,1 < t £ 100 с |
|
0,03t нс |
для |
100 < t £ 1000 с |
|
|
30 нс |
для |
1000 < t £ 10000 с |
Результирующие требования показаны на рис. 2/G811.
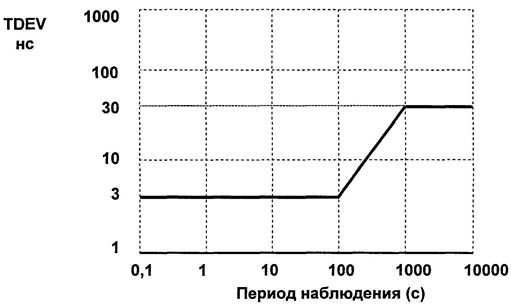
Рисунок 2/G.811): TDEV как функция периода наблюдения (интеграции) t
6.2 Дрожание фазы
Так как большинство технических данных в этой Рекомендации не зависят от стыка выходного сигнала, на котором они измеряются, это не является причиной возникновения дрожания фазы; требования к генерации дрожания фазы должны использовать существующие технические требования, которые установлены различными для различных скоростей стыков. Эти требования установлены раздельно для стыков, указанных в разделе А.1.9. Для согласования с другими требованиями к дрожанию фазы технические данные приводятся в UIpp (размах в единичных интервалах), где UI соответствует обратной величине от скорости передачи сигнала на стыке.
Собственное дрожание фазы на частоте 2048 кГц и стыках выходного сигнала 2048 кбит/с, измеренное в течение интервала 60 с, не должно превышать 0,05 UIpp при измерении через полосовой фильтр с граничными частотами 20 Гц и 100 кГц.
Собственное дрожание фазы на частоте 1544 кГц и стыках выходного сигнала 2048 кбит/с, измеренное в течение интервала 60 с, не должно превышать 0,015 UIpp при измерении через полосовой фильтр с граничными частотами 20 Гц и 40 кГц.
7 Непостоянство фазы
Необходимо, чтобы первичные эталонные задающие генераторы имели очень высокую надежность, а также включали резервное оборудование для того, чтобы была уверенность в непрерывности выходного сигнала. Однако любое непостоянство фазы из-за операций внутри задающего генератора приведет к удлинению или укорочению интервала тактовой синхронизации сигнала и не должно на выходе задающего генератора превышать 1/8 UI (это относится к выходным сигналам со скоростью 1544 кбит/с, 2048 кбит/с или частоте 2048 кГц).
8 Ухудшение качественных показателей PRC
Если имеется избыточность, а частота задающего генератора значительно отличается от номинального значения, это должно быть определено и затем проведено переключение на исправный генератор. Это переключение должно быть выполнено, до того, как превышены требования для MTIE и TDEV.
9 Стыки
Требования в данном документе относятся к эталонным точкам, которые могут быть внутри оборудования или элемента сети (NE), внутри которых находится PRC, и поэтому не обязательно доступны для измерения и анализа со стороны пользователя. Следовательно, качественные показатели PRC установлены не для этих внутренних эталонных точек, а скорее для внешних стыков оборудования. Стыками выходного сигнала, нормируемыми для оборудования, в которое может входить задающий генератор PRS, являются следующие:
- стыки 2048 кГц в соответствии с Рекомендацией МСЭ-Т G.703/раздел 10 при дополнительных требованиях на дрожание и дрейф фазы, установленных там;
- стыки 1544 кбит/с в соответствии с Рекомендацией МСЭ-Т G.703/раздел 2 при дополнительных требованиях на дрожание и дрейф фазы, установленных там;
- стыки 2048 кбит/с в соответствии с Рекомендацией МСЭ-Т G.703/раздел 6 при дополнительных требованиях на дрожание и дрейф фазы, установленных там;
- другие стыки (такие как синусоидальный сигнал от 8 кГц до 5 МГц) подлежат дальнейшему изучению.
Имейте в виду, что не все указанные выше стыки могут иметься во всех видах оборудования.
А.2 Стандарт ETS 300 462-3 (01/97) в части сетевых норм на дрожание и дрейф фазы первичного эталонного генератора и принципов их применения и измерения (разделы 4-6, частично 7 и приложение А.1)
4 Основная концепция по управлению дрожанием и дрейфом фазы3
____________
3 В данном документе материал из исходного документа приводится выборочно, при этом нумерация пунктов дается по оригиналу.
В серии 300 462 стандартов ETS описывается сеть синхронизации, как логически особый сетевой уровень с собственными правилами проектирования и требованиями к качественным показателям. Концепция по управлению дрожанием и дрейфом фазы на уровне сети синхронизации такая же, как применяется к уровням транспортной сети по переносу нагрузки, и которую можно найти в Рекомендации МСЭ-Т G.823. Она основана на необходимости рекомендовать максимальный сетевой допустимый предел, который не должен быть превышен на любом стыке сети. Этот сетевой допустимый предел представляет собой худший случай накопления дрожания и дрейфа фазы в эталонной цепи сети синхронизации, показанной на рисунке 5 стандарта ETS 300 462-2. Главная цель установления сетевого допустимого предела состоит в том, что он должен предусматривать максимальную величину дрожания и дрейфа фазы, которую может выдерживать любой элемент синхронизации на своем входе, пока сетевой допустимый предел не превышен на выходе элемента синхронизации где бы то ни было в сети. Сетевые допустимые пределы поэтому косвенно обеспечивают требования для нижнего предела максимально допустимого дрожания и дрейфа фазы на входе элементов синхронизации.
Устойчивость к дрейфу фазы большого комплекса цифровых коммутаторов на 64 кбит/с, т.е. дифференциальный дрейф фазы, который коммутатор может выдержать до того, как возникнет управляемое проскальзывание, учитывая то, что нормы на показатели проскальзываний, установленные в Рекомендации МСЭ-Т G.822, должна удовлетворяться при введении новых транспортных технологий в сети. Этот дифференциальный дрейф фазы представляет собой эффект накопления дрейфа фазы в сети синхронизации и дрейфа фазы, который может быть введен при транспортировании информационного сигнала между коммутаторами. В случае SDH в большинстве реализаций последний зависит от дрейфа фазы, который элементы сети SDH выдерживают на входах синхронизации. Поэтому необходимо, чтобы дрейф фазы в сети синхронизации, который подходит также для синхронизации SDH, был управляемым до уровня, который обеспечивает нормы на показатели проскальзываний на коммутируемой сети на 64 кбит/с.
Следует отметить, что смысл определения сетевого допустимого предела состоит в том, что в реальных сетях значения дрожания и дрейфа фазы для большинства стыков синхронизации должны быть существенно внутри границ сетевых допустимых пределов, потому что последние будут проявляться в конце цепи синхронизации, которая имеет такую же длину, как эталонная цепь.
5 Стыки синхронизации
Стыки синхронизации, нормы на которые устанавливаются в данном стандарте, изображены на рисунке 1. Этот рисунок является расширенным вариантом рисунка 6 стандарта ETS 300 462-2, где показаны примеры реальных физических стыков, которые могут иметь место в сетях синхронизации. Всемирное координированное время (UTC) показано на рисунке, как эталонное, по отношению к которому устанавливаются все сетевые допустимые пределы. Из-за способа, который должен быть задан, не имеется физического объекта или стыка, соответствующего UTC. Может быть использовано два альтернативных метода распределения синхронизации между блоками обеспечения синхронизацией (SSU) и между первичным эталонным генератором (PRC) и блоками SSU. При распределении сигналов тактовой синхронизации для SDH предполагается использование уровня секции SDH с каскадом секций не более, чем из 20 промежуточных сетевых элементов SDH, в каждом из которых есть задающий генератор оборудования SDH (SEC). При распределении сигналов тактовой синхронизации для плезиохронной цифровой иерархии (PDH) используется тракт PDH на 2 Мбит/с, который может пройти через ряд промежуточных ступеней мультиплексирования PDH и линейных систем PDH. Они подробно не показаны, так как в них нет задающих генераторов, которые являются предметом данного стандарта.

Примечание 1: Максимальное число задающих генераторов в этих цепочках устанавливается в ETS 300 462-2
|
|
Стык синхронизации на выходе PRC, для которого применяется допустимый предел |
|
|
Стык синхронизации на выходе SSU, для которого применяется допустимый предел |
|
|
Стык синхронизации на выходе SEC, для которого применяется допустимый предел |
|
|
Стык синхронизации на выходе распределения синхронизации PDH, для которого применяется допустимый предел |
Рисунок 1/ETS 300 462-3: Эталонная
цепь синхронизации, показывающая,
где применяются сетевые допустимые пределы
На рисунке 1 показано, что в сети синхронизации можно различить четыре типа стыков синхронизации:
- стыки синхронизации на выходах PRC (ПЭГ);
- стыки синхронизации на выходах SSU;
- стыки синхронизации на выходах SEC;
- стыки синхронизации на выходах распределения сигналов PDH.
Поэтому данный стандарт предусматривает четыре варианта требований к сетевым допустимым пределам, по одному для каждого типа стыка.
6 Эталонная сеть синхронизации
Эталонная сеть синхронизации, которая определена на рисунке 5 стандарта ETS 300 462-2, должна поддерживать не только однородную транспортную сеть SDH, к которой рано или поздно приводит развитие транспортной сети, а также иметь способность развиваться до всеобщей транспортной сети SDH. В переходный период может иметь место смешанная ситуация, когда информационные тракты могут проходить как через подсети PDH, так и через подсети SDH. Дополнительное размещение PDH/SDH, может вызвать увеличение дрейфа фазы, которому подвергается информационный тракт, так как дрейф фазы, который появляется на выходе одного фрагмента ("острова") SDH, проходит прямо через последующие фрагменты при асинхронном процессе размещения. Имеется поэтому переходный период, который накладывает более строгие требования к качественным показателям сети синхронизации.
Чтобы обеспечить согласование технических требований к отдельным элементам синхронизации с сетевыми допустимыми пределами, необходим процесс итерации (последовательного приближения). Накопление дрейфа фазы в эталонной сети синхронизации было рассчитано на основе ряда допущений относительно:
- числа и качественных показателей отдельных элементов синхронизации;
- числа и величины нарушений непрерывности фазы (скачков фазы) в сети синхронизации;
- уровня суточного дрейфа фазы.
Результирующее качество сети синхронизации затем было распространено на эталонную модель для информационного тракта четырех синхронных фрагментов. Далее значения допущений изменялись, пока не была найдена комбинация, которая удовлетворяет требованию на средний дифференциальный дрейф фазы, который выдерживает оконечное оборудование буфера проскальзывания (например, станция на 64 кбит/с), т.е. менее 18 мкс в течение 1 суток. Допущения, которые были найдены для удовлетворения этого требования, приведены в приложении В.
Подчеркивается, однако, что возможны многие другие комбинации допущений, которые соответствуют сетевым допустимым пределам, которые получены в результате и даны в приложении В. Они подробно рассмотрены в информационном приложении только в качестве рекомендации. При условии, что эти допущения выполняются, допустимый предел дрейфа фазы в 18 мкс удовлетворяется также при пересечении зон многих операторов.
Оператор сети может пользоваться различными вариантами правил, например, различным числом SSU и допущением на скачки фазы в цепи синхронизации, если придерживаться допустимых пределов сети синхронизации для дрожания и дрейфа фазы, установленных в данном стандарте.
7 Сетевые допустимые пределы для дрожания и дрейфа фазы на стыках синхронизации
В требованиях к сетевым допустимым пределам для стыков синхронизации должны, главным образом, отражаться результаты теоретического анализа худшего случая накопления дрожания и дрейфа фазы в сети синхронизации. Эти значения затем служат для установки требований к устойчивости оборудования синхронизации. Однако, должна также быть возможность проверки посредством измерений в реальной сети, не превышаются ли на конкретном стыке заданные значения. Место стыка в цепи синхронизации этой сети определяет, какой запас можно ожидать по сравнению с эталонными сетевыми допустимыми пределами.
Как показано на рисунке 1, SSU может принимать тактовый сигнал посредством распределения SDH или PDH. Сетевые допустимые пределы на выходе этих распределительных цепей представляют собой величину дрожания и дрейфа фазы, которую может выдержать SSU на своем входе. Так как для стыков PDH допустимо более высокое дрожание фазы, чем для Синхронного транспортного модуля (STM-N) уровня N, сетевые допустимые пределы для распределительных выходов PDH представляют собой худший случай из того, что должен выдерживать на своих входах SSU. Устойчивость к дрожанию и дрейфу фазы SEC должна, по крайней мере, быть равной по величине дрожанию и дрейфу фазы последнего SEC в цепи синхронизации. Так как вклад последнего SEC в цепи в сетевые допустимые пределы на выходах SEC, т.е. величина дрожания и дрейфа фазы, которую можно ожидать на выходе последнего SEC цепи, является малым, сетевые допустимые пределы на выходе последнего SEC в цепи можно использовать, как требования к устойчивости для SEC к дрожанию и дрейфу фазы.
Из большого числа имеющихся временных характеристик были выделены те, которые позволяют как обеспечить нормы, так и возможность оперативной проверки. Считается, что выбранные характеристики обеспечивают достаточную информацию, чтобы иметь уверенность в удовлетворительной работе сетей PSTN и SDH.
7.1 Сетевые допустимые пределы для дрожания фазы
Максимально допустимые составляющие высокочастотного шума в тактовом сигнале устанавливаются с помощью сетевых допустимых пределов для дрожания фазы.
Теоретическая схема для измерения выходного дрожания фазы на стыке синхронизации изображена на рисунке 2. Рисунок не является реальной схемой. Дрожание фазы измеряется при помощи фильтров с полосами пропускания f1-f4 и f3-f4 с характеристиками спада первого порядка 20 дБ/декаду и не должно превышать допустимых пределов В1 и В2, приведенных в таблице 2, при измерении в течение 60-секундного интервала. Дополнительные подробности об измерительной схеме можно найти в Рекомендации МСЭ-Т О.171.
Таблица 1/ETS 300 462-3: Сетевые
допустимые пределы для дрожания фазы
на распределительных выходах PRC, SSU,
SEC и PDH
|
Сетевые допустимые пределы на: |
f1 [Гц] |
f3 [Гц] |
f4 [Гц] |
В1 [UIpp] |
В2 [UIpp] |
|
Выходы PRC |
20 |
- |
100 |
0,05 |
- |
|
Выходы SSU |
20 |
- |
100 |
0,05 |
- |
|
Выходы SEC |
20 |
49 |
100 |
0,5 |
0,2 |
|
Распределительные выходы PDH |
20 |
18000 |
100 |
1,5 |
0,2 |
|
ПРИМЕЧАНИЕ: Для стыков синхронизации 2 Мбит/с и 2 МГц UIpp (полный размах в единичных интервалах) обратно пропорционален скорости передачи. Для стыков на других скоростях передачи синхронизации применяется соответствующее значение в единицах времени. |
|||||
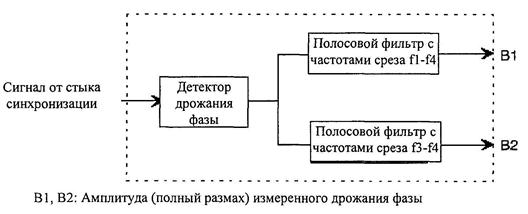
Рисунок 2/ETS 300 462-3:
Теоретическая схема измерений дрожания
фазы на стыке синхронизации
7.2 Сетевые допустимые пределы для дрейфа фазы
Двумя временными параметрами, которые были выбраны, чтобы характеризовать нарушения непрерывности фазы и низкочастотный шум на стыке синхронизации, являются "Максимальная ошибка временного интервала" (MTIE) и "Девиация времени" (TDEV). Подробные определения MTIE и TDEV можно найти в стандарте ETS 300 462-1 [1]. MTIE считается полезной для сбора данных о фазовых изменениях в сигнале тактовой синхронизации, так как она характеризует максимальную фазовую вариацию тактового сигнала в течение периода времени. MTIE является недостаточной, чтобы показать фоновый шум тактового сигнала, из-за ее чувствительности к нарушениям непрерывности фазы (скачкам фазы). Случайный шум лучше характеризуется с помощью TDEV, которая является оценкой среднеквадратической мощности вместо пиковой оценки. TDEV предназначено для устранения скачков фазы в сигнале тактовой синхронизации, и поэтому лучшим видом оценки процессов фонового шума. Чтобы обеспечить корректность, скачки фазы и периодические составляющие должны быть исключены из информационного сигнала до расчета TDEV. Это не подходит, однако, для сетевых стыков, так как априори не известны типы нарушений, которым подвергается тактовый сигнал. Это означает, что нельзя гарантировать, что результаты TDEV после обработки необработанных данных, реально отражают процессы случайного шума в тактовом сигнале на сетевом стыке, но они могут обеспечить хорошую оценку (обратитесь к разделу В.3 в приложении В стандарта ETS 300 462-1.
Дрейф фазы является результатом случайных процессов, и поэтому результаты измерений будут изменяться в течение времени и от стыка к стыку среди рассматриваемой группы. Сетевые допустимые пределы, которые устанавливаются в данном стандарте, представляют собой значения 2s от ряда измеренных значений для конкретного стыка. Другими словами, 95 % всех результатов измерений на любом стыке, должны быть ниже масок сетевых допустимых пределов для этого стыка.
Время дискретизации t0 и сглаживающий фильтр, который должен использоваться для измерений MTIE и TDEV, приведены в приложении А.
Сети синхронизации являются прозрачными к дрейфу фазы с очень низкими частотами. Следовательно, два сигнала, принятые на том же узле, где их тактовые сигналы выделяются из одного и того же источника, но прошедшие через разные тракты, могут в худшем случае иметь противоположную девиацию фазы. Минимальная устойчивость к дрейфу фазы в диапазоне частот, где соответствующее оборудование подвергается влиянию дифференциальной фазовой девиации между двумя входами, поэтому выше, чем сетевой допустимый предел для абсолютного значения дрейфа фазы. На качественные показатели задающего генератора влияют только фазовые вариации, которые попадают на выбранный вход синхронизации. Именно поэтому абсолютные сетевые допустимые пределы в последующих разделах можно прямо использовать для того, чтобы установить требования к устойчивости к дрожанию и дрейфу фазы SSU и SEC.
7.2.1 Сетевые допустимые пределы для дрейфа фазы на выходах PRC
Максимальный дрейф фазы, который может быть выработан на выходе PRC (ПЭГ), выраженный в MTIE, не должен превышать допустимых пределов, приведенных в таблице 2.
Таблица 2/ETS 300 462-3: Сетевой
допустимый предел для дрейфа фазы
на выходах PRC, выраженный в MTIE
|
MTIE |
Интервал наблюдения |
|
25 нс |
0,1 < t £ 83 с |
|
0,3t нc |
83 < t £ 1000 с |
|
300 нс |
1000 < t £ 30000 с |
|
0,01t нс |
t > 30000 с |
Результирующая общая норма изображена на рисунке 3.

Рисунок
3/ETS 300 462-3: Сетевой допустимый предел для
дрейфа фазы
на выходах PRC, выраженный в MTIE
Максимальный дрейф фазы, который может быть выработан на выходе PRC, выраженный в TDEV, не должен превышать допустимых пределов, приведенных в таблице 3.
Таблица
3/ETS 300 462-3: Сетевой допустимый предел для
дрейфа фазы
на выходах PRC, выраженный в TDEV
|
TDEV |
Интервал наблюдения |
|
3 нс |
0,1 < t £ 100 с |
|
0,03t нc |
100 < t £ 1000 с |
|
29,7 + 0,0003t нс |
1000 < t £ 1000000 с |
При интервалах наблюдения более 1 миллиона секунд для PRC играют роль другие эффекты, чем охватываемые указанной выше формулой. По этой причине норма на TDEV в данном стандарте ограничивается 1 миллионом секунд. Для более долгих интервалов наблюдения сетевые допустимые пределы достаточно характеризуются нормой на MTIE.
Общая норма на TDEV показана на рисунке 4.
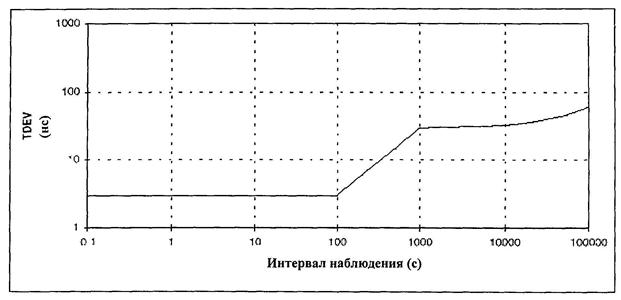
Рисунок 4/ETS 300 462-3: Сетевой допустимый предел для дрейфа фазы
на выходах PRC, выраженный в TDEV
Приложение
А (обязательное) (к стандарту ETS 300 462-3):
Сглаживающий
фильтр, который должен использоваться при измерениях MTIE
и TDEV
А.1 Концепция измерений
Измерение TDEV тактового сигнала на сетевом стыке делается с целью получения характеристик случайного шума в сигнале. Чтобы оно было корректным, переходы (нарушения непрерывности фазы) и периодические составляющие должны быть исключены из информационного сигнала до расчета TDEV с целью получения как можно лучшей оценки случайных процессов. Это не является, однако, практически осуществимым для измерений на сетевых стыках, так как априори не известны типы ожидаемых нарушений. Кроме того, применение конкретных соображений для исключения определенных составляющих из тактового сигнала могло бы привести к неоднозначным результатам, которые нежелательны для установления требований к сетевым стыкам.
По этой причине TDEV следует рассчитывать из необработанных данных измерений. Важно также для совместимости при измерении параметров MTIE и TDEV, чтобы были установлены требования к сглаживающему фильтру, максимальному времени дискретизации и интервалу измерений. Они приведены ниже.
А.2 Технические требования к фильтру, время дискретизации и интервал измерения
Для интервалов измерения от 0,1 с до 1000 с MTIE и TDEV следует измерять через фильтр нижних частот первого порядка с эквивалентной полосой 10 Гц, при максимальном времени дискретизации t0, равном 1/30 с. Минимальный период измерения Т для TDEV в 12 раз больше интервала наблюдения t.
Для интервалов измерения от 10 с до 100 000 с MTIE и TDEV следует измерять через фильтр нижних частот первого порядка с эквивалентной полосой 0,1 Гц, при максимальном времени дискретизации t0, равном 3,3 с. Минимальный период измерения Т для TDEV в 12 раз больше интервала наблюдения t.
Имейте в виду, что для любых других диапазонов интервалов наблюдения максимальное время дискретизации t0 и частота среза fc измерительного фильтра должны иметь то же соотношение с минимальным интервалом наблюдения tmin, который используется выше, т.е. t0 = tmin/3 и fc= l/tmin Гц.
Чтобы иметь уверенность, что погрешность измерения за счет несоответствия параметров фильтра мерцающему фазовому шуму меньше 8 % по отношению к идеальному фильтру нижних частот первого порядка, должны быть разработаны характеристики сглаживающего измерительного фильтра для целей испытания соответствия маскам настоящего стандарта. Имейте в виду, что на суммарную погрешность измерения влияет также ряд других факторов, таких как погрешность усиления измерительной аппаратуры, время измерения, стабильность температуры, алгоритм расчета MTIE/TDEV и т.д.
Чтобы удовлетворить требование по погрешности в 8 %, было продемонстрировано следующее значение допуска сглаживающего фильтра на 10 Гц. Этот допуск предусматривается только в качестве рекомендации:
• амплитуда неравномерности в полосе пропускания ±0,2 дБ (за исключением коэффициентов постоянного усиления);
• частота среза на уровне 3 дБ: fc = 10 Гц ± 15 %.
Допуск изображен на рисунке А1 в виде масок (шаблонов) максимальной и минимальной характеристики.<
![]()
![]()

![]()

![]()

Рисунок
Al/ETS 300
462-3: Допустимые пределы характеристики фильтра
для измерения дрейфа фазы
А.3 Рекомендация МСЭ-Т G.810 (08/96) в части терминов и определений для параметров задающего генератора (из раздела 4) и схем измерений параметров первичных эталонных генераторов (из раздела 9)
А.3.1 Термины и определения4
____________
4 См. сноску на стр. 27.
4.1.3 Отклонение частоты - Frequency departure
В основе его лежит долговременный сдвиг (смещение) частоты сигнала тактовой синхронизации относительно идеальной частоты.
4.1.9 Стандартная частота - Standart frequency
Частота с известным соотношением с частотой стандарта.
4.1.10 Время - Time
Термин "время" используется для установления момента (времени дня) или как измеренное значение временного интервала.
ПРИМЕЧАНИЕ: Слова "время" или "тактовая синхронизация (или хронирование)" (timing) при применении для описания сетей синхронизации обычно относятся к сигналам с определенной частотой повторения, используемым для синхронизации или измерений.
4.1.11 Шкала времени - Time scale
Система четкого приведения в порядок событий.
ПРИМЕЧАНИЕ: Она может быть последовательностью равных временных интервалов с точными по отношению у эталону границами этих интервалов, следующих друг за другом без каких-либо перерывов, начиная с четко обозначенного момента. Шкала времени позволяет обозначить время каждого события. Например, календари являются шкалами времени. Сигнал с определенной частотой повторения не является шкалой времени (каждый интервал не маркирован и не обозначен по времени). По этой причине должна использоваться термин "Частота UTC" вместо "UTC".
4.1.12 Дрожание фазы (сигнала тактовой синхронизации) - (Timing) Jitter
Кратковременные изменения значащих моментов сигнала тактовой синхронизации относительно их идеальных положений во времени (где под понятием "кратковременные" подразумевается, что эти изменения имеют частоту больше или равную 10 Гц).
4.1.14 Всемирное (универсальное) координированное время - UTC
Шкала времени, поддерживаемая Международным бюро мер и весов (BIPM) и Международной службой земного вращения (IERS), которые формируют основу для координированного распространения стандартных частот и сигнала времени.
ПРИМЕЧАНИЕ: Эталонной частотой для сети синхронизации является частота, которая вырабатывает шкалу времени UTC. Предпочтительнее поэтому использовать термины "Частота UTC" вместо "UTC".
4.1.15 Дрейф5 фазы - Wander
Долговременные изменения значащих моментов цифрового сигнала относительно их эталонных положений во времени (где понятие "долговременные" подразумевает, что эти изменения имеют частоту менее 10 Гц).
____________
5 Одним из используемых вариантов перевода термина "Wander" является выражение "блуждание фазы", однако в русском тексте данного документа применяется термин "дрейф фазы", принятый в отраслевых нормативных документах.
ПРИМЕЧАНИЕ: Для целей данной Рекомендации и связанных с ней Рекомендаций данное понятие не включает дрейф, вызванный сдвигом и дрейфом частоты.
4.2.1 Задающий генератор - Clock
Оборудование, которое обеспечивает получение сигнала тактовой синхронизации.
ПРИМЕЧАНИЕ: Слово "Clock" обычно при использовании для сетей синхронизации означает генератор частот, который должен использоваться для синхронизации сети.
4.2.2 Стандарт частоты - Frequency standart
Генератор, выходной сигнал которого используется как сигнал эталонной частоты.
4.2.5 Первичный эталонный (задающий) генератор (ПЭГ) - Primary Reference Clock (PRC)
Стандарт эталонной частоты, который обеспечивает сигнал эталонной частоты согласно Рекомендации G.811.
4.2.6 Ведомый задающий генератор - Slave Clock
Задающий генератор, выходной сигнал которого подстраивается по эталонному сигналу тактовой синхронизации, получаемому от задающего генератора более высокого качества.
4.5.2 Относительное отклонение частоты - Fractional frequency deviation
Отношение разности между действительной частотой сигнала и заданной номинальной частотой к номинальной частоте.
4.5.3 Погрешность по частоте - Frequency accuracy
Максимальная величина относительного отклонения частоты для заданного временного интервала.
ПРИМЕЧАНИЕ: Погрешность по частоте включает первоначальный сдвиг (смещение) частоты и некоторое ее отклонение за счет старения и воздействия окружающей среды.
4.5.5 Стабильность частоты - Frequency stability
Случайное и/или вызываемое окружающей средой изменение частоты в течение заданного временного интервала.
ПРИМЕЧАНИЕ: Обычно различают систематические воздействия, такие как эффекты дрейфа частоты (за счет радиации, давления, температуры, влажности, источников питания, заряда, старения и т.д.) и стохастические флюктуации частоты, которые обычно характеризуются во времени (для того, чтобы характеризовать эти флюктуации, были разработаны специальные переменные: вариация Аллана, модифицированная вариация Аллана, переменная времени) и/или в зависимости от частоты (односторонняя спектральная плотность дисперсия времени).
4.5.9 Сигнал тактовой синхронизации (хронирующий сигнал) -Timing signal
Номинальный периодический сигнал, генерируемый задающим генератором для управления хронированием операций в цифровом оборудовании и сетях. Из-за неизбежных нарушений, таких как флюктуации фазы генератора, действительные сигналы тактовой синхронизации являются псевдопериодическими, т.е. интервалам времени между последовательными равными фазовыми моментами присущи медленные изменения.
4.5.10 Эталонный сигнал тактовой синхронизации - Reference timing signal
Сигнал тактовой синхронизации с заданными качественными показателями, который может быть использован в качестве источника тактовой синхронизации для ведомого задающего генератора.
4.5.11 Измерительный опорный тактовый сигнал - Measurement reference timing signal
Сигнал тактовой синхронизации с заданными качественными показателями, используемый в качестве временной основы для измерения характеристик задающего генератора. Основным допущением является то, что его качественные показатели должны быть значительно лучше по измеряемому параметру, чем у задающего генератора, подлежащего испытанию, для того чтобы предотвратить искажение результатов измерения. Параметры качественных показателей стандарта частоты должны быть установлены для всех результатов измерений.
4.5.12 Функция времени - Time function
Временем задающего генератора является измеренное значение идеального времени t, производимого этим задающим генератором. Математически функция времени Т(t), генерируемая задающим генератором, определяется, как:
![]()
где: T(t) является суммарной мгновенной фазой сигнала тактовой синхронизации на выходе задающего генератора, а
![]() является
номинальной частотой задающего генератора.
является
номинальной частотой задающего генератора.
4.5.13 Функция временнóй ошибки - Time error function
Временнóй ошибкой задающего генератора по отношению к стандарту частоты является разность между временем (интервалом времени) данного задающего генератора и стандарта частоты.
Временнáя ошибка является основной функцией, посредством которой могут быть рассчитаны многие параметры стабильности (такие как MTIE, TIErms, дисперсия Аллана и т.д.): так как практически недостижимо, чтобы было постоянно известно значение функции x(t), для этой цели используются последовательности равномерно разнесенных отсчетов хi = x(t0 + it0).
4.5.14 Функция ошибки временного интервала - Time interval error function
Разность между измеренным значением временного интервала, производимого задающим генератором, и измеренным значением того же самого временного интервала,
производимого эталонным задающим генератором. Математически функция ошибки временного интервала, TIE(t; т) (ОВИ), может быть выражена, как:
![]()
где t - интервал времени, обычно называемый интервалом наблюдения.
4.5.15 Максимальная ошибка временного интервала, MTIE (МОВИ)
Максимальное значение размаха изменения задержки данного сигнала тактовой синхронизации по отношению к идеальному сигналу тактовой синхронизации в течение времени наблюдения (t = nt0) для всех значений времени наблюдения, длительность которых находится в пределах периода измерения (T). Она оценивается при помощи следующей формулы:
![]() , где n
= 1, 2, …, N-1
, где n
= 1, 2, …, N-1
4.5.16 Максимальная относительная погрешность временного интервала, MRTIE (МООВИ)
Максимальное значение размаха изменения задержки выходного сигнала тактовой синхронизации по отношению к заданному входному сигналу тактовой синхронизации в течение времени наблюдения (t = nt0) для всех значений времени наблюдения, длительность которых находится в пределах периода измерения (Т).
4.5.17 Девиация временного интервала, TDEV или sx (ДВИ)
Измеренное значение ожидаемого изменения времени сигнала, как функция времени интеграции. TDEV может также обеспечивать информацией о спектральных составляющих фазового (или временного) шума сигнала. TDEV выражается в единицах времени. На основе последовательности отсчетов ошибки временного интервала TDEV оценивается при помощи следующего расчета:
 ,
,
n = 1, 2, …, целая часть от ![]()
|
где xj |
отсчеты данных временных ошибок; |
|
N |
суммарное число отсчетов; |
|
t0 |
интервал дискретизации для временных ошибок; |
|
t |
время интеграции, независимая переменная для девиации времени (TDEV); |
|
n |
число интервалов дискретизации при n = 1, 2, ... , в пределах времени интеграции t. |
При этом время интеграции t равно nt0. В Приложении II/G.810 дается техническая информация по параметру TDEV.
ПРИМЕЧАНИЕ: В некоторых случаях систематические воздействия, такие как пошаговое квантование фазы и частоты, могут маскировать шумовые составляющие. См. также главу "Доводы за и против" [Pros and cons] Приложения II.3/G.810.
4.5.19 Нарушение непрерывности фазы - phase transient
Нарушения фазы ограниченной длительности.
А.3.2 Схемы измерения
А.2.2.2 Схема измерения независимого задающего генератора
Любая ситуация, когда нет общего главного задающего генератора, управляющего сигналами тактовой синхронизации, между которыми измеряется, ошибка по времени, относится к схеме независимого задающего генератора. Примеры, где применяется эта схема, показаны на рисунке А.2.2. Ошибка временного интервала, измеряемая в схеме независимого задающего генератора, при этом имеющего зависимость от собственных шумов задающего генератора, подвержена влиянию имеющегося сдвига (отклонения) или дрейфа частоты задающих генераторов, участвующих в измерении.
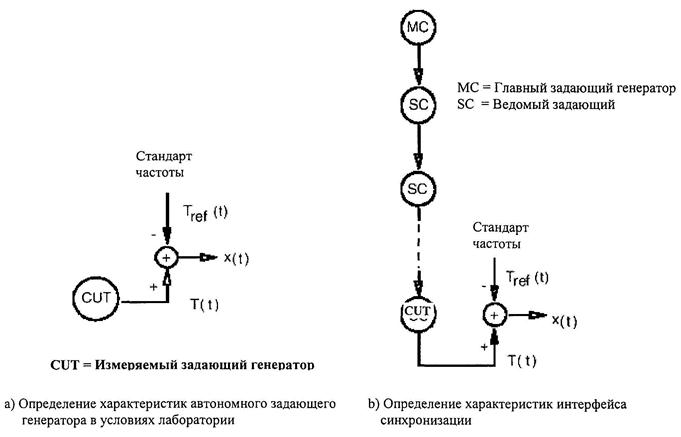
Рисунок 2/G.810): Примеры измерения ошибки временного интервала в схеме независимого задающего генератора
ПРИЛОЖЕНИЕ Б
ШАБЛОНЫ ИМПУЛЬСОВ СИНХРОСИГНАЛОВ
В данном приложении приведены шаблоны импульсов стандартных стыков электрических цифровых каналов и трактов передачи (ГОСТ 26886 и Рекомендации МСЭ-Т G.703), которым должны соответствовать синхросигналы на выходах ПЭГ.

Примечание: Для нагрузочного сопротивления 120 Ом значения напряжения должны быть соответственно: 3В (100 %), 1,5 В (50 %), 0,3 В (10 %) и 0,6 В (20 %)
Рисунок Б.1: Шаблон импульса для первичного цифрового стыка (2 048 кбит/с)

ПРИМЕЧАНИЕ: В пределах заштрихованной области шаблона сигнал должен быть монотонным.
Рисунок Б.2: Шаблон импульса для синхронизационного стыка (2 048 кГц).
ПРИЛОЖЕНИЕ В
ЛИТЕРАТУРА
1 ГОСТ 22670-77 Сеть связи цифровая интегральная. Термины и определения.
2 ГОСТ 26886-86 Стыки цифровых каналов передачи и групповых трактов первичной сети ЕАСС. Основные параметры.
3 ГОСТ 27763-88 Структуры циклов цифровых групповых сигналов первичной сети Единой автоматизированной системы связи.
4 ОСТ 45.90-96 Стыки цифровых каналов и трактов первичной сети Взаимоувязанной сети связи Российской Федерации. Методы испытаний основных параметров.
5 Рекомендация МСЭ-Т G.810. "Термины и определения для сетей синхронизации", 08/96.
6 Рекомендация МСЭ-Т 0.172 (06/98) "Аппаратура для измерения дрожания и дрейфа фазы тактовых сигналов в цифровых системах, основанных на синхронной цифровой иерархии (SDH)", проект.
7 Руководящий документ отрасли "Правила технической эксплуатации первичных сетей Взаимоувязанной сети связи Российской Федерации", книга 2 "Указания по технической эксплуатации аппаратуры и оборудования, трактов и каналов передачи", введенный Приказом Госкомсвязи России № 187 от 19.10.98 г.
8 Стандарт отрасли ОСТ 45.92-96 "Метрологическая служба Министерства связи Российской Федерации. Организационная структура. Задачи и взаимодействие структурных звеньев".
9 Рекомендация МСЭ-Т G.811. "Временные характеристики на выходах первичных эталонных задающих генераторов", 02/97.
10 ГОСТ 15855-77 Измерения времени и частоты. Термины и определения.
11 Соглашение о взаимодействии Государственного комитета России по стандартизации, метрологии и сертификации и Министерства связи Российской Федерации по метрологическому обеспечению отрасли "Связь", утвержденное Заместителем председателя Госстандарта России и Первым заместителем Федерального Министра связи в апреле-мае 1997 г.
12 Руководящий технический материал по построению тактовой сетевой синхронизации на цифровой сети связи Российской Федерации - М.: ЦНИИС, 1995.
13 Европейский стандарт электросвязи ETS 300 462-6 "Передача и мультиплексирование (ТМ). Общие требования для сетей синхронизации. Часть 6: Временные характеристики первичных эталонных задающих генераторов, март 1998.
14 Европейский стандарт электросвязи ETS 300 462-3 "Передача и мультиплексирование (ТМ). Общие требования для сетей синхронизации. Часть 3: Управление дрожанием и дрейфом фазы в сетях синхронизации, январь 1997.
15 Рекомендация МСЭ-Т G.812. "Временные требования к ведомым задающим генераторам, пригодным для использования в качестве узловых в сетях синхронизации", 06/98.
16 Руководящий документ отрасли "Рекомендации по метрологическому обеспечению системы тактовой сетевой синхронизации (ТСС) на цифровой сети общего пользования", утвержден УЭС Госкомсвязи России 18.05.98 г.
17 Правила по метрологии ПР 50.2.009-94 ТСИ. Порядок проведения испытаний и утверждения типа средств измерений", Госстандарт России.
18 Руководящий документ отрасли РД 45.002-96 "Руководство по установлению номенклатуры средств измерений, подлежащих поверке".
19 Правила по метрологии ПР 50.2.006-94 "ГСИ. Порядок проведения поверки средств измерений", Госстандарт России.
20 Правила по метрологии ПР 50.2.014-96 ТСИ. Правила проведения аккредитации метрологических служб юридических лиц на право поверки средств измерений", Госстандарт России.
21 Рекомендация МСЭ-Т G.703. Физические/электрические характеристики иерархических цифровых стыков, 04/91.
22 Рекомендация МИ 2188-92 "ГСИ. Меры частоты и времени. Методика поверки", Госстандарт России.
23 ГОСТ 5237-83. Аппаратура электросвязи. Напряжения питания и методы измерений.
24 ГОСТ 22261-94. Средства измерений электрических и магнитных величин. Общие технические условия.
25 ГОСТ 30428 Совместимость технических средств электромагнитная. Радиопомехи индустриальные от аппаратуры проводной связи. Нормы и методы испытаний.
26 Приборы для измерения дрожания и дрейфа фазы в цифровых сигналах электросвязи. Технические требования. Методы испытаний, ОСТ 45.134-99, проект.
27 Рекомендация МСЭ-Т 0.171. Аппаратура для измерения дрожания и дрейфа фазы в цифровых системах, основанных на плезиохронной цифровой иерархии (PDH), 04/97.
СОДЕРЖАНИЕ